

為什么“自動駕駛”看不見停著的車?
 play
play
歡迎關注“新浪科技”的微信訂閱號:techsina
文/Hooknows
來源:十一車
終于,所謂的“自動駕駛”問題引起了所有人的重視,盡管代價是(又)一條生命。
如今廣泛應用的所謂“自動駕駛”,實際上無一例外皆屬于(SAE自動駕駛分級下的)Level 2級別,而Level 2級系統完完全全不能對行車安全做任何程度的擔保——這本應讓每一個汽車消費者作為常識的常識,卻在從車企到消費者整體的浮躁和默許之下,直到最近一位蔚來車主不幸喪命才終于獲得了“傳播正確”。
很難說這不是我們所有人的悲哀。
關于此次事故的具體原因,目前警方還在調查中,我們且不發表什么評論。但有個細節可能很多人都不知道,在蔚來ES8的車主手冊中,有一條清晰明確的警告:“如前車靜止或緩行,Pilot存在無法剎停的風險。”
無獨有偶的是,幾乎同一時間,美國國家公路交通安全管理局(NHTSA)宣布,由于發生多起特斯拉汽車與停放的緊急車輛相撞的事故,該局已經開始對特斯拉的Autopilot自動輔助駕駛系統展開正式調查,涉及2014年以來的76.5萬輛特斯拉汽車,調查中確定的事故已造成了1人死亡、17人受傷。
這或許是一個機會,一個讓大家從自動駕駛大躍進中平靜下來,好好理一理所謂的“自動駕駛”——高級駕駛輔助系統一些基本原理的機會。放在以前,認真解釋“自動駕駛”為什么會撞上靜止車輛,大概只會被打成反智能化而行的保守頑固分子。
多普勒的靜止陷阱
靜止不動的目標,為什么反而是駕駛輔助系統的弱點?這其實是一個很基礎很基礎的話題,并不涉及任何自動駕駛(這里指真的自動駕駛)高階知識。
自動駕駛的最初階段和幼年形態,是ACC自適應巡航系統。而ACC誕生之初,借助的就是車載毫米波雷達,這個配置在今天應該不稀罕了。雷達大家都知道:天線發射出無線電波,碰到障礙物就會反彈回來,依照光速計算一下時間差,你就得到了障礙物的距離。

但要用在汽車上,用于自動駕駛或駕駛輔助系統,我們不止要知道前方有沒有車輛/障礙物,要知道前方車輛的距離,還得知道前方車輛的速度。同樣100米處,一輛靜止的車與一輛和我們同速同向的車,意義顯然截然不同。
普通的雷達,要想知道物體的速度,要靠發射兩次回波再接受兩次回波,用物體兩次時間移動的距離估算速度。比如上一秒雷達測得物體離我們1米,這一秒雷達測得物體離我們1.05米,于是我們只能估計它的速度是:秒速五厘米。
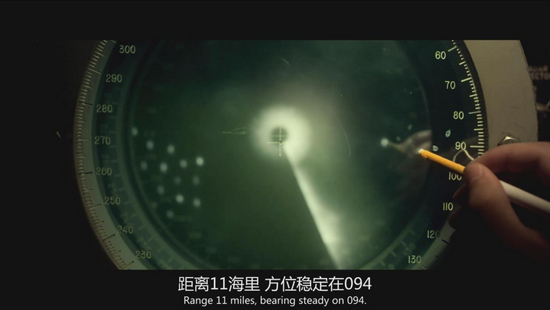 《灰獵犬號》中的早期雷達,只有方位和距離坐標
《灰獵犬號》中的早期雷達,只有方位和距離坐標這顯然很不精確,也必然會有滯后,速度并不是實時得到的。用于航海之類的大場景通常足夠,但對于汽車自動駕駛而言就太粗糙了,用今天的互聯網黑話講可以叫“顆粒度不夠”。
直到20世紀的人們想起了18世紀著名大閑人多普勒先生的發現,多普勒效應。這個多普勒效應你可以這么理解:接近我們的物體和遠離我們的物體,反射回來的電磁波波長和頻率,和與我們相對靜止的物體比起來會有所變化。
測得變化方向和變化的值,我們就能得到物體接近/遠離我們的相對速度。因為我們自己的速度通常很容易得到,簡單計算即可得到對面物體運動的絕對速度。

 兩張圖解釋多普勒效應,截取自B站up主@tifafan
兩張圖解釋多普勒效應,截取自B站up主@tifafan重要的是,通過多普勒原理測得速度可以認為是實時的,不像以往那樣要測兩次然后距離除以時間才得到,更精確且沒有延遲。對于汽車自動駕駛和駕駛輔助系統而言,實時速度感知這個特點再適合不過了。今天我們熟悉的車載毫米波雷達,就是利用多普勒原理獲取路上車輛的速度信息(當然也有方位和距離信息)。
但多普勒雷達也有自己的問題。
其實不光是路上行駛著的車輛有回波,靜止不動的欄桿路牌大樹路燈電線桿等等也都有回波。多普勒雷達之所以能“認出”行駛的車輛,是因為它將靜止物體的回波通通視為了“背景”。而行駛中的車輛,相對于靜止的地面等背景是有速度的,于是它們就“脫穎而出”。
這就造成了一種可能:如果是一輛停下來靜止不動的車,會不會就混入了“背景”之中?所以包括此次事故車蔚來ES8在內,許多使用了毫米波雷達作為ACC傳感器的品牌,才會在車主手冊中加入這么一條:如前車靜止或緩行,xxx存在無法剎停的風險。
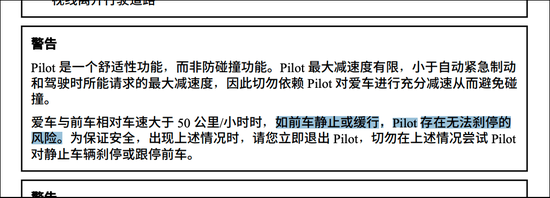 來自蔚來ES8車主手冊
來自蔚來ES8車主手冊其實不光是汽車自動駕駛,這個問題甚至在軍事領域也一樣存在。
軍用飛機希望躲過多普勒雷達的追捕,有一種常用的方法叫做“39機動”,“39”代表3點鐘方向到9點鐘方向,即橫過來垂直于對方雷達飛行。這時在雷達的主要探測方向上,飛機的相對速度與地面背景是一樣的,也就有可能偷摸兒從多普勒雷達的追蹤下溜走。
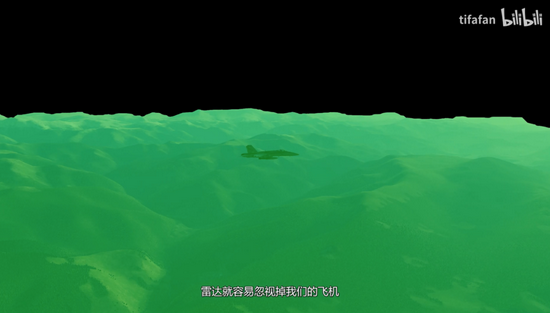 截取自B站up主@tifafan
截取自B站up主@tifafan毫米波or視覺識別
在汽車領域,毫米波雷達借助多普勒效應識別出正在行駛的車輛(他們的位置和速度),而對于靜止的物體則需要加以甄別:它究竟是不該出現的障礙物,還是路面背景的一部分?
這并不是一件容易的事,因為在雷達眼里,世界并不是(我們想象中的)這樣:
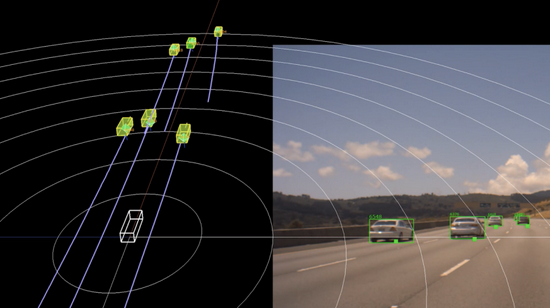
而是這樣:
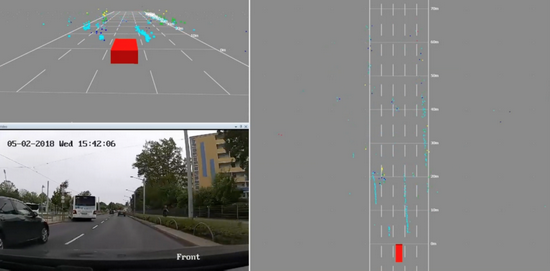
現在已經應用的車載毫米波雷達,基本都不具備將探測到的物體具象化的能力,并且都無法識別高度坐標。也就是說同樣在路中間但橫跨在路上方的路牌,和真正停在路中間的車輛,在雷達眼里是不容易區分的。為了防止識別錯誤導致的頻繁緊急制動等情況,毫米波雷達通常干脆放棄了對靜止和低速物體的探測,而將這些任務交給視覺識別系統。
配備毫米波雷達的高級輔助駕駛系統,基本都同時擁有視覺識別(攝像頭)。但視覺識別眼下還完全不具備100%的識別可靠性:攝像頭可能被遮擋沾污,取決于各家算法的覆蓋程度不同,可能無法識別所有出現在路上的物體(比如工程車)。
視覺識別高度依賴機器學習的積累,和最終得到的識別算法,雖然識別能力一直在提高,但眼下總會有一些情況尚未覆蓋到的。同時視覺識別也容易受到外界條件的干擾,天氣、塵土等等都會影響使用效果。
說到底,就是目前、市面上、任何已經投入使用的“自動駕駛”功能,都完全沒有信心敢打包票說自己能應對可能出現在路上的任何狀況。這壓根就不是一個技術問題——否則Level 2就不會被定義為“需要駕駛員始終保持注意力”;這是一個純粹的使用和宣傳問題,一個“為什么全行業都在將輔助駕駛強行渲染成‘自動駕駛’”的問題。

(聲明:本文僅代表作者觀點,不代表新浪網立場。)

作者簡介




