

31歲蔚來車主追尾身亡!禍在自動駕駛,罪在過度宣傳
 play
play

歡迎關注“新浪科技”的微信訂閱號:techsina
文/蒔草
來源:螺旋實驗室(ID:spiral_lab)
31歲,對于一位優秀的企業家來說,正是人生進取拼搏的黃金年齡,但卻因為一場車禍戛然而止,無法迎接下一個立秋。
七夕當天,“美一好”公眾號發布訃告,創始人林文欽(昵稱“萌劍客”)于8月12日駕駛蔚來ES8汽車啟用自動駕駛功能(NOP領航狀態)后,在沈海高速涵江路段發生追尾事故,不幸逝世。

這場嚴重車禍再一次將自動駕駛技術推上風口浪尖,讓人不禁想起2016年全球首例自動駕駛技術所致的車禍——京港澳高速河北邯鄲段發生的一起追尾事故,特斯拉轎車直接撞上一輛正在作業的道路清掃車,特斯拉轎車當場損壞,司機高雅寧不幸身亡。
同樣是追尾,同樣身處高度公路路段,即使車企不同,時隔7年不變的是事后話術風向的驟變。
一反營銷時對消費者的信誓旦旦,蔚來強調自己是自動輔助駕駛技術,而不是自動駕駛。甚至有傳言稱蔚來技術人員私自接觸林文欽事故車,打算來個毀尸滅跡,刪除事故數據。
時間的推移,讓車企們的營銷話術和甩鍋技術迭代增長,但企業責任感和真正的技術倒是沒有半點進步。
自動or輔助?兩字之差天壤之別
說到自動駕駛,很多消費者可能第一時間想到的是汽車博主坐在車后排,而車輕輕松松上路的情景,想到的是品牌新車發布會上PPT炫酷的效果圖。如果這也是你的第一直覺,只能說明,車企們對于自動駕駛技術的宣傳非常成功,將貓描繪成老虎,還讓大家都相信了。
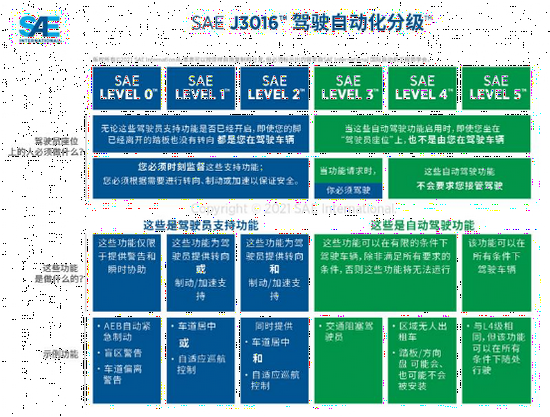
事實上現在的自動駕駛技術遠達不到無人自駕的程度,國際汽車工程師協會(SAE)將自動駕駛分成六個等級,其中L0是無自動化,L1是駕駛支援,L2是部分自動化,L3以后才有可能解放人類雙手,實現我們想象中的自動駕駛。
中國乃至世界上所有的智能車企研發的具備自動駕駛技術,經準上路能批量生產的智能汽車都停留在L2階段,能做到的是為人腦和人眼做決定時提供更便捷的解決方案,像手機一樣成為人延伸器官,降低駕駛人的駕車難度,而不是取代人腦人眼,獨立做出適合的決定。
至于汽車廠商為了凸顯自己先人一步跑在賽道前端,喜歡振臂高呼自己的汽車已經達到L2.5、L2.9階段,這都屬于偽概念。只要不是L3,哪怕是L2.999999也不能放任汽車駕駛,信了那么就輸了,輕則多收幾萬元充當智商稅,重則無知無覺冒著風險上路,性命堪憂。

不得不說,車企的營銷非常有一套,我們作為普通消費者,不能關注他們說了什么,而是要關注他們寫了什么,畢竟空口白牙說啥都不磕巴,一筆一劃寫出來的條款才能說明實況。
當前的自動駕駛更準確的定義是輔助駕駛,要求駕駛人必須保持注意力集中,關注路況,在蔚來、小鵬、特斯拉等等車企針對自己的auto pilot系統的介紹都寫有“自動輔助駕駛系統”字樣,然而在宣傳上卻常常給消費者暗示。
蔚來副總曾在微博上表示開啟輔助系統后可以解放雙手吃外賣;特斯拉介紹自己的fullselfdriving是完全自動駕駛……造車新勢力為了找準消費者,突出優勢,往往在輔助駕駛技術的宣傳上用力過猛,過度宣傳。

實際上不管新能源車企們給我們畫的餅有多大,現階段的自動輔助駕駛系統和傳統車企們的ACC自適應巡航功能并沒有本質差別,甚至像沃爾沃、寶馬等底蘊深厚的車企自帶的領航輔助駕駛系統會更加穩定,體驗感更好。
只不過對于這些習慣穩扎穩打的傳統車企來說,冒著自砸招牌的風險,在技術不成熟之前大肆鼓吹自動駕駛技術,頗不明智,實在不是一筆好買賣。
過度宣傳之禍
技術發展過程中總是會有犧牲的,直白點說,那就是每一個技術趨于完善的背后,那些教訓都是人命填出來的。
萊特兄弟發明出現代飛機雛形之前,一代代人都做過飛行夢,明朝的一個士大夫萬戶為了實現飛天夢,自己綁上47支火箭,手拿風箏飛向天空,結局浪漫而悲壯,火箭爆炸,萬戶滿懷理想死去。
對于追逐技術,以此為理想的人來說,他們為技術奉獻生命的精神是可敬的,但是這不意味著引誘一無所知的無辜者坐上滿載火箭的座駕,讓他誤以為真的可以翱翔于藍天,然后在多年后歌頌他們為技術發展所做的奉獻是正確的,這種所謂的奉獻是一種諷刺。

自動駕駛的過度宣傳、娛樂化宣傳、誤導性宣傳消解了用車場景可能遇到的危險,攸關生命。什么時候駕駛追求的不是安全至上,而是解放雙手吃外賣了?恐怕大家都更希望能回家和家人一起共進晚餐,而不是命喪車輪。
正視技術的不成熟,明確告知消費者技術的真實狀況,才是每個品牌的應有之義。
輔助駕駛就是輔助駕駛,駕駛自動化從L0發展到L2歷經百年,我們距離自動駕駛還有很長一段路需要走,想要在短短幾年內就達到終點,不能靠在地上插上標有“終點”的牌子來宣告已經勝利,虛假的終究是虛假的,宣傳上能瞞天過海,但信以為真的消費者開上路只會造就更多無辜的馬路殺手,因為他們本來可以更加警惕。
何去何從?自動駕駛的明天
從長期來看,隨著科技進步,人類實現真正定義的自動駕駛是可能的,不可否認自動駕駛技術確實擁有廣闊的前景,但也面臨著諸多瓶頸。
短期來看智能汽車的感知局限性是最突出的問題,智能汽車普遍采用攝像頭+紅外雷達作為感知器,這些感知器受天氣地形等影響大,即使經過大數據訓練形成理論上的高效模型,但是一旦放到現實道路中,靠相對單一的模型應對無窮無盡、變化多端的世界是不靠譜的。
此外更深層的問題是規劃決策,讓智能汽車像人一樣應對不同的交通狀況做出及時的決策和預測,這一點仍然是未知領域。

要知道人在駕駛時動用的不僅是思考能力、邏輯判斷能力、經驗判斷能力,還包括了潛意識判斷能力,也就是我們通常所說的“直覺”。深度學習、人工智能還停留在大數據喂養階段,想要靠硬件堆出自動駕駛技術,無異于空中樓閣。
自動駕駛的明天可能更多要寄托于接下來的理論突破、技術突破和工業化突破,就像wifi一樣,wifi之母海蒂·拉瑪發明了抗干擾的軍事通訊技術,數十年后電池、芯片才出現,然而手機量產并且應用wifi又隔了二三十年。
目前自動駕駛技術理論尚且不完善、技術尚且不成熟,就靠著資本硬推向了工業化階段,烈火烹油注定盛名之下沒有真材實料。
事物前進的道路是螺旋上升的,未來自動駕駛賽道是否會重復VRAR、人工智能等前輩的老路尚不可知,但可以預見的是,一旦出現新概念,而自動駕駛不能滿足投資者更多的想象的話,這一概念恐怕要陷入暫時的低谷,潛心等待下一次的突破,至于等待的時間是數年才是數十年,還得打上一個問號。

(聲明:本文僅代表作者觀點,不代表新浪網立場。)

作者簡介



