

讓人啼笑皆非的機器人翻車現(xiàn)場,揭示了多少行業(yè)真相?

歡迎關(guān)注“新浪科技”的微信訂閱號:techsina
文/程茜
來源/智東西(ID:zhidxcom)
智東西10月26日報道,上周二,波士頓動力的Spot和Atlas機器人大秀舞技,“復(fù)現(xiàn)”了韓國男團BTS的《Permission to Dance》MV,走位、動作都栩栩如生。

機器人開始進軍娛樂圈,這是否意味著智能機器人離主宰地球、統(tǒng)治人類的未來又更進了一步?畢竟從它萌芽之初,這樣的擔(dān)憂就一直圍繞在它周圍。
不過波士頓動力的機器狗還只是個例,像這樣的顧慮現(xiàn)階段仍然是杞人憂天。
畢竟圍觀這么多年機器人發(fā)展,迄今能走進人們?nèi)粘I钪械母魇綑C器人,不僅跟碳基生物的智商還相差甚遠(yuǎn),而且時不時做出一些或笨拙或愚蠢的行為。
就連馬斯克畫了一年的人形機器人“大餅”,也在10月1日舉行的特斯拉AI Day上被抬著出場,讓不少人感覺,就這?

半解剖裸露電線版特斯拉機器人,小心翼翼、步履蹣跚地完成了一次驚險首秀。

這些年來,盡管機器人技術(shù)一直在進步,但走進主流視野的典型機器人們,總是不時貢獻(xiàn)出一些令人啼笑皆非的槽點,特斯拉人形機器人的驚險首秀已經(jīng)不算什么了,甚至還有人形機器人摔倒、掃地機器人炸家、送貨機器人翻車、寫作機器人裝文化……
那么問題來了:為什么機器人發(fā)展了60多年,卻仍然行動遲緩、智商堪憂,并總是存在一些安全隱患?
機器人“翻車”現(xiàn)場:爬不起來、看不清、抓不住,甚至?xí)滤?/strong>
機器人的發(fā)展速度已經(jīng)非常迅猛,從波士頓動力機器人翻跟頭、跳男團舞,到掃地機器人解放人類雙手、機械臂在工廠內(nèi)按部就班,不過,看起來突飛猛進的機器人,卻夾雜著各種各樣的翻車事件,令人啼笑皆非。
1、控制差:摔倒后自救困難,只能靠人工幫助
2021年世界人工智能大會上,人形機器人Walker X本該自信滿滿地演示快速行走,但沒走幾步,Walker X卻突然蹬腿倒地,直挺挺地趴在地板上,看起來是膝關(guān)節(jié)部位突然伸直使得人形機器人無法保持平衡,并且Walker X倒地瞬間和人腿部抽筋的狀態(tài)也十分相似。

不光人形機器人翻車,四條腿的機器狗也出故障了。
今年8月,一個“機器狗買咖啡”的視頻在網(wǎng)上大火,有博主購買了宇樹科技機器狗Go 1,并讓它前往附近的咖啡店買一杯咖啡,但后續(xù)發(fā)展卻啼笑皆非,本來科技感滿滿又炫酷的視頻變得喜感十足。
在官方發(fā)布的Go 1機器狗宣傳視頻中,它可以從3米高的地方后空翻落地后繼續(xù)正常起立行走,但視頻中Go 1前往咖啡館時在本該左轉(zhuǎn)的地方卻一直往前沖還打了個滾無法起身,不知道它是不是因為意識到走錯路了,卻沒剎住車,情急之下表演了一項雜技來轉(zhuǎn)移人們的注意力。

機器狗經(jīng)歷“千難萬險”后,終于到達(dá)咖啡店買到了咖啡,正式開啟配送之路。但博主為它上面安裝的置物筐竟然沒有固定咖啡的裝置,導(dǎo)致沒走兩步其中一杯咖啡就光榮犧牲了。又因為地面有灑下的咖啡,機器狗就開始在地面滑步,不能正常行走,咖啡“全軍覆沒”,最后只能靠博主來實施人工救援。

2、小“聾瞎”:離譜避障、摸魚好手,掃地機“發(fā)糞涂墻”
除了控制外,機器人的傳感系統(tǒng)出現(xiàn)故障,造成的后果往往令人啼笑皆非。
波士頓動力的人形機器人能翻跟頭、跑酷、跳男團舞,誰能想到它也翻過車呢。2017年,在“未來科學(xué)家與技術(shù)領(lǐng)袖大會”上,波士頓動力的人形機器人Atlas首次亮相,它抱著箱子完美走完一圈后,本來應(yīng)該停下“謝幕”,卻抱著箱子翻下了演示臺。
不知道它是不是看上了這個箱子,想要趕緊抱走,結(jié)果走錯了路。

人形機器人即使翻車,但離我們的生活仍然很遙遠(yuǎn),像消殺、導(dǎo)購、掃地機器人現(xiàn)在幾乎隨處可見,它們遇到故障往往也會波及人類。
新冠疫情爆發(fā)以來,邊溜達(dá)、邊消毒的消殺機器人時常會出現(xiàn)在商場中,但下圖這個消殺機器人在執(zhí)行任務(wù)時,本應(yīng)從開門的位置順利通過,但最后它幾乎是蹭著門的邊緣硬擠過去的。不過,消殺機器人只要消殺到位,怎么到達(dá)下一個目的地其實是不是也不重要。

還有商場里出現(xiàn)很多的導(dǎo)購機器人,省去了我們問路、導(dǎo)航的繁瑣過程。
不過本來應(yīng)該乘坐直梯或者只在商場的一層內(nèi)工作的福州中防萬寶城導(dǎo)購機器人,在2020年12月25日,卻試圖乘坐自動扶梯下樓,這就顯得有點自不量力了。
剛挨到傳送帶,它就從自動扶梯上翻滾而下,還撞到了前方的兩位乘客。正常情況下,導(dǎo)購機器人的底盤面積遠(yuǎn)遠(yuǎn)大于自動扶梯供人站立的面積,因此它應(yīng)該會主動避開這類地點,以防自己摔倒。

上面兩類機器人可能只是看起來有些智障,但下面這個就是“聞起來”令人絕望了。友情提醒,吃飯時請忽略下圖,這是一張有味道的圖片。
現(xiàn)如今,能掃、能拖的掃地機器人已經(jīng)成為我們居家生活的好幫手。但今年6月,北京一男子的掃地機器人在地板有狗狗大便的情況下,仍然兢兢業(yè)業(yè)的打掃完全屋,而他的另一臺負(fù)責(zé)拖地的機器人在識別到前方的糞便障礙物后就停止工作了。

上面說的可能是機器人識別上翻車,而下面這個機器人直接在工作時開始摸魚。網(wǎng)友戲稱:這個熱狗機器人像極了上班摸魚的我。
路邊的熱狗機器人本來是為過路的打工人提供24小時服務(wù),在饑腸轆轆的時候能吃到一個熱氣騰騰的熱狗。但你有經(jīng)歷過買了一個熱狗,卻只有面包嗎?這個熱狗機器人在“組裝”熱狗和面包時,分別將它們放到了兩個架子上,然后只把面包裝進了包裝袋,絲毫不顧及旁邊的熱狗。

不僅熱狗機器人,能寫一手好字的書法機器人也開始摸魚了。
2021年11月,機器人制造企業(yè)ABB在進博會上展示了一個書寫機器人,演示過程中它需要模仿中間紙上的“進博”二字,它提筆、沾墨、寫字一氣呵成后,紙上卻并沒有出現(xiàn)字?原來是它的筆尖并沒有落到紙上。
隨后,書寫機器人也立馬補救,寫出了漂亮的字,但人們對它翻車的關(guān)注明顯更高。

此外,還有一種和導(dǎo)購機器人形態(tài)類似的安保機器人,只不過它們的工作場所是在室外。
美國機器人創(chuàng)企Knightscope的安保機器人K5,是專門為停車場、校園、醫(yī)院的安保巡邏而設(shè)計,能夠應(yīng)對復(fù)雜多變的地形。
不過2017年7月,K5在熟悉了華盛頓一處辦公樓附近環(huán)境一周后,卻發(fā)生了掉到噴泉里的慘劇,幾乎被“淹死”。當(dāng)天各大報紙的頭條都在大開腦洞,試圖為它“自殺”找一個合理的解釋,又說它是因為厭倦工作,還有說因為失足跌倒,卻沒有“手臂”支撐它站起來。

美國出租車企業(yè)Uber也聘請了安保機器人K5進行巡邏,但這次事故相比于“淹死機器人自己”則更為嚴(yán)重。
2016年7月,K5在美國加利福尼亞州的斯坦福購物中心巡邏時撞到了一個16個月大的小朋友,當(dāng)他面朝下摔倒后,機器人并沒有停下來,而是繼續(xù)開走了,仿佛什么都沒有發(fā)生。

3、失手:機械化操作,不能靈活變通而傷人
機器人在實際應(yīng)用上,本該展示它們高超的自動化工藝,或者精湛的下棋、巡邏技藝時,往往會出現(xiàn)因嚴(yán)格遵循流程,不能靈活應(yīng)對突發(fā)情況的事件。
今年7月,莫斯科國際象棋公開賽上出現(xiàn)了特殊的選手——象棋機器人。本來是比拼棋藝的激烈場面,象棋機器人卻一把夾住對方棋手的手,導(dǎo)致小朋友手部受傷。原因好像是小朋友本來已經(jīng)下子,卻想調(diào)整一下,而象棋機器人則不能靈活變通,失手傷人。
不過不得不說,機器人在遵守規(guī)則方面真的很嚴(yán)格了。

其實下棋機器人現(xiàn)在還不常見,但電商倉庫、汽車制造工廠中,為了節(jié)省人力成本,往往會安裝成百上千臺機器人來代替人工完成重復(fù)性工作。
但與上述原因一致,過于遵循預(yù)定的流程,就會導(dǎo)致突發(fā)變故時難以及時調(diào)整機器人的動作。
2021年12月,美國新澤西州亞馬遜倉庫因機器人發(fā)生了慘案。一個機器人在工作過程中戳破了有毒的防熊噴劑,導(dǎo)致80名亞馬遜員工身體不適,24名員工因為有毒氣液外泄而被送醫(yī)。

在汽車制造工廠中同樣如此,2015年8月,印度汽車配件生產(chǎn)公司SKH Metals的24歲工人Ramji Lal,在工作時被一名機器人殺死。
他的同事說:“機器人經(jīng)過預(yù)先編程,可以焊接由它抬起的金屬板。在生產(chǎn)過程中,一塊金屬板脫臼了,Ramji Lal從機器人后面伸手去調(diào)整它。但預(yù)編程的機器人直接用焊條刺穿了他的腹部。”

4、暈頭:多機協(xié)同無法靈活變通,一臺故障全部“歇菜”
尤其是大型工廠內(nèi),經(jīng)常會有很多分揀、配送機器人來協(xié)同工作,它們每天各司其職,使得貨物分揀、運送等工作流程都十分高效。
但2021年7月,英國電商網(wǎng)站Ocado分揀機器人發(fā)生碰撞后引發(fā)的火災(zāi)足足燃燒了18個小時。

5、智障:人機對話時經(jīng)常“雞同鴨講”
安保機器人還發(fā)生過一件糗事。
諸如下圖的美國加州安保機器人,在巡邏時,理應(yīng)讓人們獲取幫助時更加便捷,但一名女士向安保機器人報案時,該機器人非但沒有受理案件,還為她唱了一首歌,不知道是不是當(dāng)時已經(jīng)到了安保機器人的下班時間。

機器人智障背后的秘密:軟件、算法要背鍋
回到剛開始的問題,為什么機器人仍然看起來不夠聰明?想回答這個問題,我們可以從機器人是怎么動起來的入手。
顧名思義,機器人就是“機器”+“人”,如果機器人的運動行為難以理解,我們可以先想想自己。當(dāng)眼睛看到前面有石頭,把這一傳遞給大腦,大腦將需要采取行動避開障礙物的信號傳遞給四肢,然后我們抬腿邁過石頭。
我們再放到機器人系統(tǒng)中來看,機器人中的傳感系統(tǒng)對應(yīng)的就是五官,控制系統(tǒng)就是大腦,而驅(qū)動和執(zhí)行機構(gòu)在人體中可能沒有具體對應(yīng)的位置,但可以近似看作我們的四肢和關(guān)節(jié)等。
 ▲機器人四大系統(tǒng)(圖片來源:CSDN)
▲機器人四大系統(tǒng)(圖片來源:CSDN)現(xiàn)在看來,機器人很多行為表現(xiàn)智障到令人無語。帶著這個疑問,智東西對話了機器人行業(yè)的多位資深人士后,我們發(fā)現(xiàn)背后的原因與上面的四大系統(tǒng)密不可分。
1、控制、驅(qū)動系統(tǒng):機器人已經(jīng)可以平衡控制,特殊場景有待優(yōu)化
小嬰兒最開始學(xué)的就是走路,和機器人一樣,不論是雙足、四足、輪子和履帶機器人,最先學(xué)習(xí)的就應(yīng)該是保持機器人動態(tài)平衡。這些形態(tài)的機器人在保持平衡時難易程度不同,其中和生命體形態(tài)類似的四足、雙足機器人是技術(shù)難度較高的。
原因是這類形態(tài)的機器人足部與地面接觸面積很小,再加上材質(zhì)硬度較高,就好比你穿著滑冰鞋走在地面上時,也很容易失去平衡摔倒。
 ▲機器人形態(tài)
▲機器人形態(tài)我們回過頭來看機器人翻車集錦里的“機器狗買咖啡”事件,久平科技創(chuàng)始人、CEO王雪松說:“其實從完整的視頻中可以看到,在機器狗摔倒之后,它有明顯的自救行為,但可惜因為地面有咖啡,導(dǎo)致并沒有自救成功。”
從根源來講,如何在有咖啡等液體的光滑地面正常行走?這個問題屬于常見情況中的特殊情況,也就是說,我們不可能在剛學(xué)走路時就學(xué)習(xí)穿著滑冰鞋在冰場里滑行。王雪松談道,未來,機器人研發(fā)過程中可能會針對于這類特定的場景進行研發(fā)。
在讓機器人動起來的環(huán)節(jié)中,還有驅(qū)動系統(tǒng)的關(guān)鍵部件——驅(qū)動電機,顧名思義,就是驅(qū)使機器人運動的系統(tǒng)。超級駱駝聯(lián)合創(chuàng)始人兼智能裝備負(fù)責(zé)人莊子駿談道,對于機器人本體來講,現(xiàn)在國內(nèi)機器人玩家面前的難題還在于驅(qū)動電機的國產(chǎn)化、小型化。其中,波士頓動力的機器人驅(qū)動方式采用的是液壓驅(qū)動,而其他特斯拉、小米等機器人都采用的是電機驅(qū)動,我們可以簡單理解為前者是靠液壓油的壓力勢能,后者是靠電勢能。
就實現(xiàn)效果而言,機器人電機的能力已經(jīng)可以滿足機器人一般場景下的使用。但在為機器人提供動力的同時,如何使其更加微型化、輕量化,占用較小面積就能達(dá)到相同的功效也十分重要。畢竟體型越大的機器人體內(nèi)所需的精密零部件也就越多,理想情況下當(dāng)然是部件越小越好了。
 ▲特斯拉人形機器人的6種驅(qū)動電機
▲特斯拉人形機器人的6種驅(qū)動電機2、傳感系統(tǒng):純線條不能識別糞便,模擬人眼構(gòu)建三維視圖
令人印象深刻的機器人翻車事件莫過于掃地機器人“發(fā)糞涂墻”了,而這也和機器人的五官密不可分,除了看到還需要讓它們看清前面是什么,到底能不能清掃,會不會搞壞自己。
因此,模擬人眼的3D視覺方案就是目前最有效的。
機器人的視覺感知系統(tǒng)主要包括激光雷達(dá)、3D視覺兩種。激光雷達(dá)就和智能汽車上的一樣,其工作原理是,向前方的目標(biāo)發(fā)射探測信號,然后將接收到的從目標(biāo)反射回來的信號進行適當(dāng)處理,獲取前方目標(biāo)的相關(guān)信息。
值得注意的是,這種信號是線條狀的激光束,因此只能讓機器人感知到前方的物體形狀或者前方有障礙物,并不能明確物體形態(tài)到底是什么。
 ▲掃地機器人激光雷達(dá)三角測距原理(圖片來源:思嵐科技)
▲掃地機器人激光雷達(dá)三角測距原理(圖片來源:思嵐科技)但是即便單用激光雷達(dá)不能實現(xiàn)更好的感知,讓機器人玩家做純視覺方案也很難,這背后的難點在于對算力、芯片的需求。因此國內(nèi)一些機器人玩家采用了激光雷達(dá)和3D視覺相結(jié)合的方案來進行感知,這樣在算力和感知能力上都得到了一定的提升。
不過,算力、資金在特斯拉面前都不算什么難題,特斯拉的人形機器人“擎天柱”采用的就是純視覺方案。超節(jié)點創(chuàng)新科技林智賓說:“特斯拉能做機器人的一個原因就是,它將做智能汽車的HW3.0系統(tǒng)移植到了機器人算力系統(tǒng)中,可以支撐起視覺計算。”
 ▲特斯拉人形機器人的視覺方案演示
▲特斯拉人形機器人的視覺方案演示除了算力要求外,這背后的研發(fā)成本、人才儲備也讓機器人玩家苦不堪言。林智賓補充道,隨著自動駕駛、無人機、元宇宙等領(lǐng)域?qū)σ曈X人才的需求不斷增多,機器人玩家在這其中的競爭力稍弱,因此視覺人才的儲備對于機器人玩家來說也是一大難題。
這也導(dǎo)致,最近幾年擁有3D視覺的掃地機器人大多出現(xiàn)在高端掃地機器人設(shè)備上,如今年3月,iRobot的旗艦掃地機器人Roomba J7就采用的是視覺避障技術(shù),而這款掃地機器人的價格高達(dá)849美元(約人民幣5500元).
 ▲iRobot的Roomba J7可以識別糞便并及時避開
▲iRobot的Roomba J7可以識別糞便并及時避開此外,即便機器人通過視覺感知到前方物體,但其識別事物特征的方式與人類不同,如人類在識別貓的種類時,可能會通過毛色、長短、眼睛和耳朵的形狀、叫聲等,但計算機也許是通過別的特征來進行判斷。
因此,研發(fā)人員可能只能看到其識別結(jié)果,而無法從精準(zhǔn)優(yōu)化其識別過程。
3、軟件:機器人成長還不成熟,無法應(yīng)對特殊未知情況
再從更加宏觀的技術(shù)角度來看,久平科技創(chuàng)始人、CEO王雪松告訴智東西,機器人在硬件領(lǐng)域的基礎(chǔ)設(shè)施已經(jīng)相對成熟,沒有特別大的技術(shù)難點,在一些關(guān)鍵零部件上基本成熟。“走的顫顫巍巍的原因更多還是在軟件、算法上。”
機器人的靈活性已經(jīng)可以滿足一般需求,而上面說到的突然摔倒、發(fā)生碰撞等情況,可能和其傳感器突然失靈有關(guān),與其硬件本身的關(guān)系不大。
人在生活、工作時也會遇到陌生的環(huán)境不知道如何應(yīng)對,只能是第一次見過后積累經(jīng)驗,所以對于機器人也是一樣,研發(fā)人員不可能在設(shè)計初期就考慮到所有的情況,因此只能針對常見的情形對其優(yōu)化。
“這背后的關(guān)鍵其實不是機器人研發(fā)的難點,而是機器人要做什么,也就是通用和專用機器人的區(qū)分。”王雪松談道。通用機器人可能是智能化程度極高,可以像人一樣靈活變通,做到“我是一塊磚,哪里需要哪里搬”,王雪松也坦言,他認(rèn)為只有當(dāng)?shù)讓拥乃懔Α⑺惴▽崿F(xiàn)突破,這一愿景才能實現(xiàn),因此,現(xiàn)階段他更傾向于專用型機器人。
機器人作為一項技術(shù),和人工智能、5G等一樣,更多是為現(xiàn)有的一些工具服務(wù),為其進行智能化升級,因此,面向細(xì)分場景的機器人,或者說能夠做到“在其位謀其職”可能是目前更應(yīng)該考慮的發(fā)展方向。
可以看出,目前為止,機器人的技術(shù)進展已經(jīng)走在前面,使得機械臂、掃地機器人等能夠在工廠、家庭里幫助人類做很多事情,但軟件層面的不足讓其真正落地、普及還是一大難題,因此,但看機器人現(xiàn)在的智障行徑,離統(tǒng)治地球、主宰人類還很遙遠(yuǎn)。
機器人研究百花齊放,“發(fā)糞涂墻”正在成為過去
雖然機器人看起來還很智障,但學(xué)界百花齊放的研究成果讓人看到這一產(chǎn)業(yè)正在飛速發(fā)展。
一直以來,模擬各種生物體的仿生機器人就是各大研究機構(gòu)青睞的領(lǐng)域。
今年10月,美國耶魯大學(xué)一只兩棲機器龜(ART)登上了國際學(xué)術(shù)頂刊Nature的封面。作為一只兩棲“動物”,它可以變換形態(tài),讓四肢在地面、水里都順暢行動。
不過看其在地面行走的時候,仍然十分笨拙,像剛剛學(xué)會走路的小嬰兒。
 ▲兩棲機器龜在耶魯大學(xué)校園里爬行
▲兩棲機器龜在耶魯大學(xué)校園里爬行有時候機器人在搜救、巡邏時往往會面對范圍特別大的情況,一臺機器人想要執(zhí)行搜救任務(wù)就會費時費力,因此,機器狗間的多機協(xié)作也是機器人界的一大研究方向。
今年10月,四足機器人研發(fā)創(chuàng)企云深處的5臺絕影X20四足機器人,自主規(guī)劃、決策,完成了在3000平米未知環(huán)境下對8個模擬目標(biāo)的協(xié)同搜索。在搜索過程中,它們還會及時“溝通”,避免搜索到重復(fù)區(qū)域,還能共享進展,這樣看來,機器狗搜救不僅能標(biāo)記已搜索點,還省去了稍顯古老的對講機設(shè)備。
 ▲云深處5臺絕影X20四足機器人協(xié)同作業(yè),實時共享搜索數(shù)據(jù)
▲云深處5臺絕影X20四足機器人協(xié)同作業(yè),實時共享搜索數(shù)據(jù)前面說到,軟件是阻礙機器人智能化的關(guān)鍵,那么如何在短時間內(nèi)讓機器人更聰明也就十分重要了。
今年8月,谷歌重磅研究進展公布,通過結(jié)合更強大的人工智能大型語言模型,使得機器人執(zhí)行命令的成功率從61%提高至74%,這項研究讓機器人從被動執(zhí)行向主動執(zhí)行、感知跨越了一大步。
這些介紹聽起來可能難以理解,舉個例子,比如,當(dāng)你問機器人:“我把飲料灑了,你能幫忙嗎?”谷歌機器人可以迅速篩出適配指令的合適行動,然后從廚房拿塊清潔海綿來。但一般機器人可能只有當(dāng)你完整說出:“我的飲料灑了,你能去廚房拿塊清潔海綿來嗎?”,才有可能理解你的意思。
 ▲經(jīng)訓(xùn)練的機器人拿可樂
▲經(jīng)訓(xùn)練的機器人拿可樂傳感系統(tǒng)上,我們看到更多的可能還是視覺,但很多研發(fā)人員已經(jīng)將視野拓展到了味覺和觸覺。
今年5月,英國劍橋大學(xué)研發(fā)人員為機器人增加了“味覺”,機器人廚師能夠嘗到西紅柿炒雞蛋到底咸不咸,并一步步調(diào)整。
事實上,機器人并不是真的嘗到了咸的味道,而是通過基于電導(dǎo)的味覺傳感器的UR5機械臂的實驗裝置,通過混合食物模擬咀嚼、電流傳導(dǎo)復(fù)現(xiàn)鹽的味道,幫助機器人品嘗食物的“味道”,也就是用電信號來表示咸信號。
 ▲機器人生成的味覺圖
▲機器人生成的味覺圖觸覺的研發(fā)進展則更令人驚艷。工業(yè)機器人搬箱子、舉重物都不在話下,但它們遇到材質(zhì)輕巧的千紙鶴該怎么辦?
今年4月,英國布里斯托大學(xué)研究人員為機器人研發(fā)了TacTip(人造指尖),也稱“光觸覺傳感器”,裝上這個人造指尖,機器人的手指就可以控制力道,輕輕提起千紙鶴,而不會只管運送不顧千紙鶴是否完好。
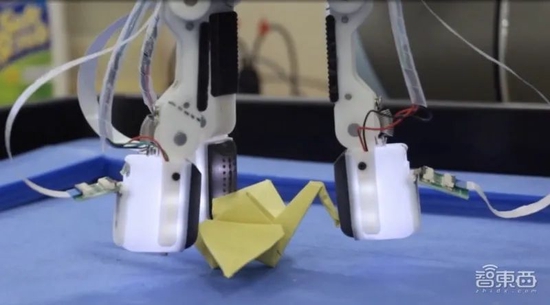 ▲裝備了TacTip的機器人成功拿起千紙鶴
▲裝備了TacTip的機器人成功拿起千紙鶴……
這些研發(fā)思路對于機器人而言都具有極大的積極意義,未來一旦應(yīng)用到機器人研發(fā)、設(shè)計、生產(chǎn)上,將會大大提升其落地應(yīng)用的潛力。
究其根本,這些研發(fā)的方向都離不開機器人最基礎(chǔ)的傳感、控制、驅(qū)動、執(zhí)行四大系統(tǒng)。
在視覺層面,現(xiàn)在味覺、觸覺傳感器距離落地應(yīng)用的機器人可能還十分遙遠(yuǎn),視覺感覺是目前最為常見的。因此,機器人如何行動的“把關(guān)人”就是視覺,但只有視覺是不夠的,“現(xiàn)在除了視覺外,還需要AI來提高機器人的估計能力。”林智賓補充道。
我們可以舉一個最簡單的例子,當(dāng)掃地機器人識別到前方有糞便時,它需要做兩件事:識別到糞便、在合適的地方繞開,如果它遠(yuǎn)遠(yuǎn)地看到糞便就繞開,那么中間很長一段距離就不會被清理到。因此,估計掃地機器人到障礙物的距離、提高AI識別能力也是各界玩家在研發(fā)的主要方向。
 ▲雙目視覺的成像原理
▲雙目視覺的成像原理現(xiàn)階段最有效的解決方案可能是雙目3D視覺,這其實就是為了模擬人的兩只眼睛,能夠同時從多方位、多角度看到物體,這也就是為什么人看到的世界是立體的。利用這種視覺方案,機器人就可以計算距離,在合適的位置及時避開。
為了加快機器人應(yīng)用落地,機器人的強化學(xué)習(xí)和虛擬環(huán)境訓(xùn)練進程也在加速。
你剛出生的時候,不會拿筷子、不會走路,在日復(fù)一日的積累、觀察下,你掌握了越來越多的技能,而這也就是機器人的強化學(xué)習(xí),從自己的經(jīng)驗和行為中不斷學(xué)習(xí),比單純靠其他人一點點教學(xué)的方式簡單多了。
這種做法不僅能縮減機器人訓(xùn)練的時間和成本,在提升其智能化上也更有效,能夠讓機器人自己驅(qū)動、控制關(guān)節(jié)來執(zhí)行指令,甚至產(chǎn)生讓研發(fā)人員意想不到的驚喜。比如,以機器狗為例,研發(fā)人員初期并沒有將應(yīng)對濕滑地面作為主要的優(yōu)化方向,但通過機器狗的自我學(xué)習(xí),也就是買了一次咖啡后,就增加了這個特殊場景的經(jīng)驗,之后或許可以及時識別前方地面上的液體并及時避開。
除此以外,機器人的訓(xùn)練成本其實非常高,如果在實際場景中訓(xùn)練,機器人容易磕碰,研發(fā)人員需要花費金錢來維修,如果造價昂貴只有一臺的話可能還會拖慢研發(fā)進度,因此,把機器人搬到虛擬世界中訓(xùn)練的想法就出現(xiàn)了。王雪松談道,他們一直在使用這種方法訓(xùn)練機器人。
今年10月,Meta(原Facebook)和紐約大學(xué)的研究人員提出了一種訓(xùn)練機器人的新框架HOLO-DEX,機器人訓(xùn)練不再需要“真刀真槍”演練,人帶著VR(虛擬現(xiàn)實)頭顯置身虛擬世界,就可以教機器人“學(xué)習(xí)”。這些VR、AR等技術(shù)與機器人技術(shù)的結(jié)合,在不斷的碰撞中,又在加速機器人智能化、靈活性的升級。
總的來看,機器人的研發(fā)思路還是要回歸到它到底要做什么這一問題上來,它作為一項技術(shù),需要解決實際場景中的實際問題。因此,莊子駿認(rèn)為,未來一定是由場景定義機器人。這些研發(fā)的進展也都遵循著這一觀點。
結(jié)語:機器人的未來是星辰大海
機器人這一看起來外形炫酷、對極客而言吸引力巨大的新物種,一直是人們熱議的話題。此次,馬斯克的人形機器人“擎天柱”更是再次將其推上話題的中心。
但目前而言,人們對于機器人的期望仍然過高,即使在硬件層面上已經(jīng)破解了多道技術(shù)難題,但作為未來被寄予厚望的機器人而言還遠(yuǎn)遠(yuǎn)不夠。夢想可以天馬行空,但技術(shù)進步還是得一步一個腳印。仍有很多懸而未決的技術(shù)難題,有待研究人員和工程師們持續(xù)探索。
特斯拉人形機器人即便在發(fā)布時走的顫顫巍巍,但該公司對機器人研發(fā)的重視程度,及其在自動駕駛領(lǐng)域的技術(shù)積累,都進一步提振了這一產(chǎn)業(yè)。不過,想要實現(xiàn)如馬斯克所言讓機器人真的走進家庭,還是難度很大的一件事。


作者簡介




