




來源:原理
大家都知道,在一個平面上,兩點之間的最短距離是直線。然而,在錯綜復雜的城市街道網絡中,我們顯然不可能總能在出發點和目的地之間選擇一條直線行進的。那么,路上的行人,是如何決定要行走的路徑的?是選擇最短的路徑嗎?
其實,已經有許多研究試圖通過嚴格的實驗來對這個問題加以闡明。但是一直以來,我們仍然缺乏一個基于真實的移動數據得出的答案。最近,麻省理工學院(MIT)的一組研究人員通過對大規模的GPS數據進行統計分析之后,發現了人類在規劃路徑時的特征。
他們的研究結果表明,當出發地和目的地之間的距離增加時,人們所選的路徑會越偏離最短路徑;另外,當出發地和目的地互換時,人們會選擇不同的路徑。研究結果發表在了《自然-計算科學》雜志上。
CarloRatti教授是新研究的作者之一,他在MIT從事城市規劃研究。20年前,當Ratti還是劍橋大學的一名研究生時,他幾乎每天都要穿行于學院宿舍和系辦公室之間。有一天,他意識在這兩個地點之間,他每天走的其實是兩條不同的路——去辦公室時走一條,回宿舍時走另一條,而且其中一條路線比另一條更高效。
這讓Ratti陷入了沉思,他意識到自己在適應兩條路線的過程中,在來和去時各選了一條。這種“一致的‘來去不一致性’”,引起了熱衷于理性思考的年輕的Ratti的興趣。
到了MIT,Ratti所進行的一類研究就是通過分析由移動設備收集的大量數據,調查人們在城市環境中的行為。幾年前,他所在的實驗室獲得了一組行人的手機GPS信號數據,這些數據來自于他們在一年時間里在波士頓和坎布里奇的行走。Ratti認為,這些數據或許可以幫助解答人們在步行游覽城市時的路徑選擇問題。
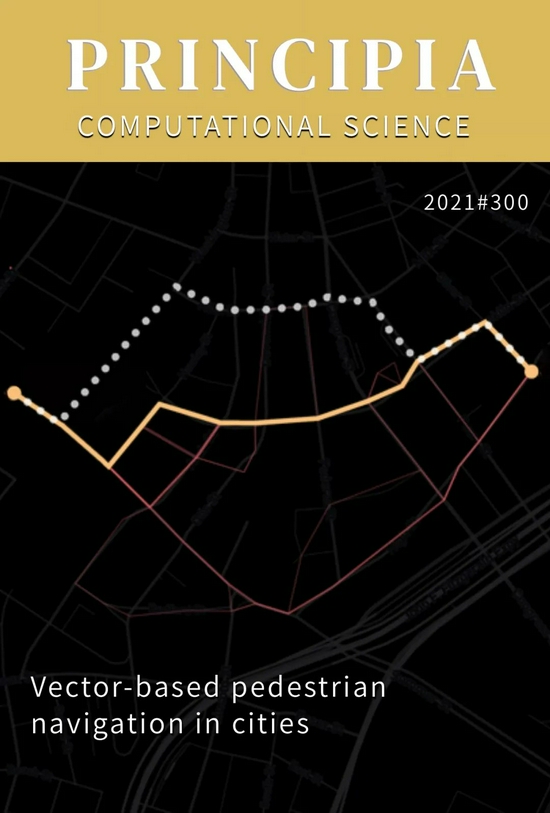
在分析了14000多人走過的超過55萬條路徑后,研究小組發現,行人并沒有選擇最短的路線,而是傾向于選擇最直接地指向目的地的路徑,即使這些路徑其實更遠,但它們在路線開始時與目的地的偏差角度最小。
這是一種被稱為矢量型導航(vector-based navigation)的行進策略。在矢量型導航模型中,目標方向是影響路徑規劃的主要因素,利用這種模型能夠在統計上比基于隨機效應的距離最小化模型更好地預測人類路徑,雖然它不會生成最短路徑,但它與最短路徑足夠接近,而且計算起來非常簡單。研究人員建議將由此產生的路徑稱為“對得最準的路徑(pointiest path)”。
研究人員發現,這種現象具有很大的普遍性。其實,過去的一些研究來在昆蟲、靈長類動物等動物身上也發現過這種行進策略。另外,它對于有著錯綜復雜的街道網絡的坎布里奇是如此,對有著網格式街道布局的舊金山也是如此。在這兩個城市,研究人員還觀察到,人們在兩個目的地之間往返時傾向于選擇不同的路線,就像Ratti在研究生時所做的那樣。
研究人員認為,矢量型導航之所以具有普遍性,是因為它比實際計算最短路徑需要的腦力更少,因此我們可能已經進化到讓大腦將更多的精力投入到其他更緊要的任務上,比如在30000年前為了逃避一只獅子,或者現在為了躲避一輛撞向我們的汽車。這樣的結果意味著在步行時,人類的大腦實際上并沒有優化到能計算所謂的最短路徑。
其實,過去的那些對動物行為和大腦活動進行的研究,尤其是對海馬體進行的研究已經表明,大腦的導航策略是基于矢量計算的。這種導航方式與智能手機或GPS設備所使用的計算機算法截然不同,后者可以根據存儲在內存中的地圖,近乎完美地計算出兩點之間的最短路線。但是,在沒有這些地圖的情況下,動物的大腦不得不想出不同的導航策略。我們不可能把一張詳細的、基于距離的地圖下載到大腦中。
那么,在制定路線時,我們還能怎么做呢?更自然的事或許是使用我們從經驗中更容易獲得的信息。根據我們在世界各地移動的經驗,以參照點、地標和角度來思考,是一種非常自然的構建地圖和導航空間的算法。其實,隨著智能手機和便攜式電子產品越來越多地將人類和人工智能結合在一起,更好地理解我們大腦使用的計算機制以及它們與機器使用的計算機制之間的關系變得越來越重要。
#創作團隊:
原文:Anne Trafton
編譯:小雨
#參考來源:
https://news.mit.edu/2021/how-brain-navigates-cities-1018
https://www.nature.com/articles/s43588-021-00130-y
#圖片來源:
Bongiorno et al。 / MIT



“掌”握科技鮮聞 (微信搜索techsina或掃描左側二維碼關注)











