




來源:快科技
8月10日,一名小鵬P7車主在寧波市一高架橋上與道路前方故障車輛和其車上乘客發(fā)生追尾碰撞,造成人員死傷。
今天上午,事件記錄視頻在網(wǎng)上流傳并迅速發(fā)酵,登上微博熱搜榜第二。
根據(jù)一段疑似當(dāng)事小鵬P7車主的微信聊天記錄顯示,他的車輛當(dāng)時正處于車道居中輔助功能的開啟狀態(tài)。

對此,小鵬汽車回應(yīng)稱:
經(jīng)核實,8月10日下午,寧波一車主駕駛車輛與前方檢查車輛故障人員發(fā)生碰撞,發(fā)生人員傷亡。我們?yōu)楸敬问鹿手胁恍译x世的遇難者感到悲痛和惋惜。
目前交警部門已經(jīng)立案處理,門店已第一時間已前往現(xiàn)場協(xié)助處理。我們將全力配合相關(guān)部門進行事故調(diào)查,持續(xù)跟進后續(xù)結(jié)果,并協(xié)助客戶處理后續(xù)相關(guān)事宜。

然而就在一年之前,同樣也是8月份,蔚來ES8也出現(xiàn)過類似的致死事故。
2021年8月12日,上善若水投資管理公司創(chuàng)始人、意統(tǒng)天下餐飲管理公司創(chuàng)始人、美一好品牌管理公司創(chuàng)始人林文欽,駕駛蔚來ES8汽車啟用NOP領(lǐng)航功能后,在沈海高速涵江段發(fā)生交通事故,不幸逝世。
類似的悲劇,其實很早就發(fā)生過。
2016年1月20日,京港澳高速河北邯鄲段發(fā)生一起追尾事故,一輛特斯拉Model S 直接撞上一輛正在作業(yè)的道路清掃車,Model S司機高先生不幸身亡。
多條人命背后,到底誰應(yīng)該來為“技術(shù)闖禍”負(fù)責(zé)?
一年之內(nèi),兩條人命
8月10日,小鵬P7發(fā)生撞擊事故的地點,是在寧波市通向機場的快速路高架橋上。
從疑似涉事車主的微信聊天記錄來看,發(fā)生事故時車輛時速在80km/h左右,并開啟了LCC車道居中輔助功能,直到追尾了停靠在最左側(cè)車道的人員和車輛。
“我一般也就高架開,沒想到,這次剛好分神。”
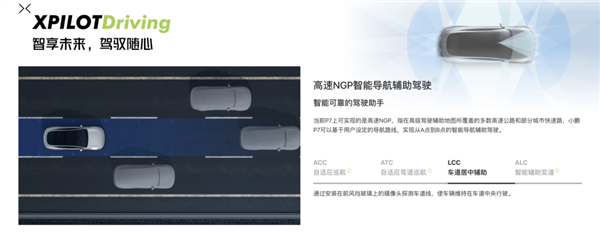
所謂的LCC車道居中輔助功能,其實就是小鵬XPILOT智能輔助駕駛系統(tǒng)中一項最基礎(chǔ)的功能,通過安裝在前風(fēng)擋玻璃上的攝像頭探測車道線,使車輛按照設(shè)定時速維持在車道中央行駛。
車輛前向的毫米波雷達則負(fù)責(zé)感知前向車輛的距離和障礙物,并控制車速。
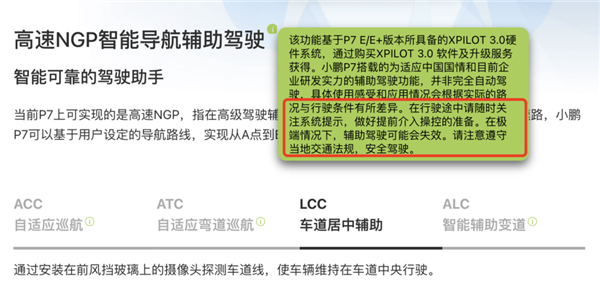
但在幾乎所有功能描述的旁邊,小鵬汽車都注釋了警示告知,如“請隨時關(guān)注系統(tǒng)提示,做好提前接入操控的準(zhǔn)備”、“請注意遵守當(dāng)?shù)亟煌ǚㄒ?guī),注意安全駕駛”等。
而且,值得注意的是,根據(jù)車主自述,涉事P7為XPILOT 2.5版本——相當(dāng)于低配版的輔助駕駛能力,采用的單目攝像頭+前置毫米波雷達的方案。
相比之下,XPILOT 3.0版本,采用了三目攝像頭,整車的高感知攝像頭數(shù)量達到9個,高精毫米波雷達的數(shù)量也達到了5個,比2.5版本多了2個。

疑似涉事駕駛員的群聊記錄
最重要的是,兩者的處理器硬件配置也有不同。只有3.0版本才是英偉達Xavier計算平臺,而這次涉事的2.5版本官方只標(biāo)注為“智能控制器”。
另外,據(jù)知情人士透露,涉事的XPILOT 2.5的輔助駕駛功能,并非小鵬自研,而是來自供應(yīng)商的解決方案。

但也許正是這些配置名字和功能數(shù)量上的細(xì)微差別,很容易讓消費者混淆。
比如小鵬P7目前有三種智能駕駛系統(tǒng)的硬件配置,分別對應(yīng)著三個級別的功能:丐版車型僅擁有定速巡航功能,而XPILOT 3.0則擁有高速NGP智能導(dǎo)航輔助駕駛,而2.5版本,則只有基礎(chǔ)的LCC車道居中輔助和ACC自適應(yīng)巡航功能。三個版本,相差了三個時代。
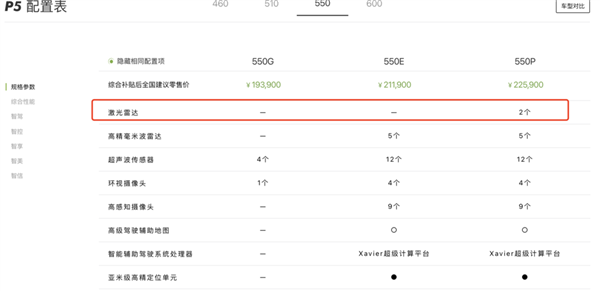
此外,在小鵬P5車型上也出現(xiàn)了類似的情況。
同一續(xù)航版本下,存在三種類型的硬件配置:最低配的版本只有1顆環(huán)視攝像頭和4顆超聲波雷達,只能實現(xiàn)定速續(xù)航;而中配車型則增加了大量的毫米波雷達、攝像頭硬件配置,實現(xiàn)了L2級輔助駕駛的功能;而高配車型在此基礎(chǔ)上,又增加了兩顆激光雷達,增加了城市NGP智能導(dǎo)航輔助駕駛的功能。三個版本車型,同樣相差著三個時代。
那么,可能就會存在一種情況:有些購買了低配車型的車主,因為聽信銷售和網(wǎng)絡(luò)內(nèi)容的忽悠,誤以為自己的輔助駕駛系統(tǒng)也具備高配車型的功能與可靠性。但在實際的道路行駛中,用戶對功能和性能邊界的混淆和誤判,往往為事故的發(fā)生埋下了禍根。
除了傳感器數(shù)量不同之外,老一代“視覺攝像頭+毫米波雷達”存在的技術(shù)短板,依舊造成了刻骨銘心的事故。

如在上文提到,蔚來在一年前也曾發(fā)生過類似“車輛處于輔助駕駛狀態(tài)下,因系統(tǒng)未感知到前方障礙物造成車毀人亡”的事故。
現(xiàn)在“視覺攝像頭+毫米波雷達”不能準(zhǔn)確識別靜態(tài)障礙物的原因:
融合攝像頭數(shù)據(jù)和毫米波雷達數(shù)據(jù)最大的障礙在于,毫米波雷達信噪比很低,換句話說有大量誤檢測,將視覺感知結(jié)果與毫米波雷達結(jié)果進行融合時候。
如果視覺和毫米波感知結(jié)果不一致,慣常做法是相信視覺,忽略毫米波檢測結(jié)果,但這也是事故的開始。特斯拉著名的“撞白色貨車”的事故,就是毫米波雷達惹的禍。
因為毫米波雷達無法測出貨車上方橋梁和道路指示牌的高度,在毫米波雷達的“眼里”,靜止的貨車、橋梁、指示牌都是地面上的物體。這種情況需要屏蔽毫米波雷達的信號,但顯然事故發(fā)生時是沒有的。
要知道,當(dāng)時涉事的蔚來ES8車型,配備的NIO Pilot自動輔助駕駛硬件系統(tǒng),采用了1個三目前向攝像頭、4個環(huán)視攝像頭、5個毫米波雷達和12個超聲波傳感器。
無論是攝像頭數(shù)量,還是毫米波雷達數(shù)量,都比這次發(fā)生事故的小鵬P7更多。高配置車型都未能避免事故發(fā)生,更何況低配車型呢?
關(guān)鍵時刻,技術(shù)如何救命?
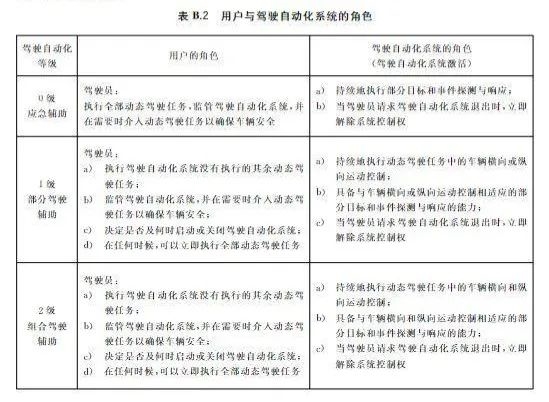
需要強調(diào)的一點是,現(xiàn)階段的自動化系統(tǒng)都只能起到輔助的作用,不能當(dāng)自動駕駛。
市場監(jiān)管總局(標(biāo)準(zhǔn)委)曾發(fā)布過一套國家標(biāo)準(zhǔn)。其中,就有針對自動駕駛功能的《汽車駕駛自動化分級》國家推薦標(biāo)準(zhǔn)(GB/T 40429-2021)。對于2級組合駕駛輔助,明確提到了用戶的角色——“監(jiān)管駕駛自動化系統(tǒng),并在需要時介入動態(tài)駕駛?cè)蝿?wù)以確保車輛安全。”
當(dāng)前在小鵬汽車的車機以及手機App端,已設(shè)置答題環(huán)節(jié)。并且,對可能遇到的失效情況都進行了視頻演示和說明。而且,如果用戶沒能通過這一學(xué)習(xí)過程后的考試,也就無法在車機端打開包括LCC車道居中輔助、NGP領(lǐng)航輔助駕駛、自主泊車等輔助駕駛功能。
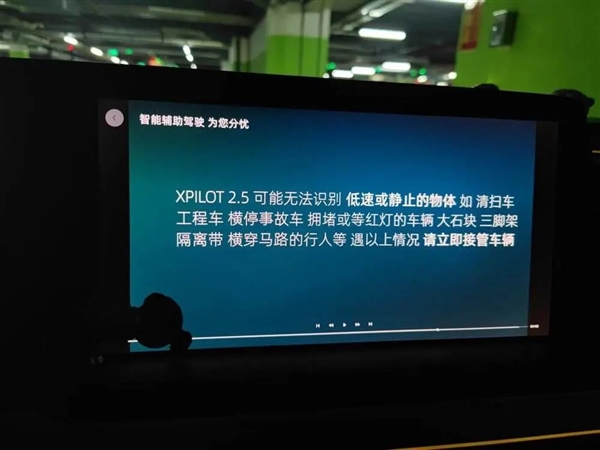
小鵬P7車機端的學(xué)習(xí)視頻
這意味著,8月10日的事故肇事者在使用輔助駕駛功能的時候,已經(jīng)明確知曉了失效風(fēng)險,以及需要接管的事實。
不幸的是,涉事P7駕駛員明確表示自己“分神了”。在需要人工介入時,這位駕駛員未及時做出剎車處理。最終造成了事故的發(fā)生,以及一條人命的代價。

疑似涉事駕駛員的群聊記錄
理論上來說,涉事車輛的DMS(Driver Monitor System,駕駛員監(jiān)控系統(tǒng))應(yīng)該及時感知到駕駛員的分心狀態(tài),并及時做出干預(yù)。
包括小鵬汽車在內(nèi),市面上一些智能汽車搭載了DMS系統(tǒng)。該系統(tǒng)主要被用于監(jiān)測車輛行駛過程中駕駛員的面部表情,發(fā)現(xiàn)類似打哈氣、看手機、分神等存在風(fēng)險的狀態(tài),并及時提醒乃至強制操縱車輛推出輔助駕駛狀態(tài)。
其中,駕駛員眼睛的狀態(tài)是DMS中很重要的一個參數(shù),基本原理是通過攝像頭對駕駛員眨眼頻率、眼睛開合幅度以及嘴巴開合程度進行量化分級,以此判斷是否疲勞駕駛和分神。
一般來說,當(dāng)駕駛員出現(xiàn)了危險駕駛行為時,DMS系統(tǒng)就會實時警報,在現(xiàn)在的輔助駕駛功能上,多次觸發(fā)更是會出現(xiàn)輔助駕駛退出。據(jù)了解,特斯拉、小鵬等車型目前是具備該操作流程的。
但是,DMS系統(tǒng)最大的問題在于識別準(zhǔn)確率的問題。前段時間,就有一位車主因為眼睛小,而被小鵬汽車誤判成睡覺被扣了好多智駕分。通過案例我們可以看出,小鵬的DMS系統(tǒng)策略盡管偏嚴(yán)苛,但基于視覺的方案可靠性并不高。
小鵬汽車CEO何小鵬在此前的采訪中就表示:“包括后面要做的自動輔助駕駛,我們都需要請司機能夠關(guān)注前方,并做到隨時接管車輛。我們內(nèi)部也正在做優(yōu)化。在原來DSM的邏輯體系里面,它對于瞇著眼的觸發(fā)做的很嚴(yán)(也就有了“誤傷”),畢竟人困的時候也會瞇著眼。這種情況下我們還要改進算法。”
“說實話,能不能百分之百做到,我們還要繼續(xù)努力。”
本質(zhì)上,技術(shù)也好、人也好,永遠都無法做到100%的完美。而在自動駕駛技術(shù)的研發(fā)上,車企必須要做的事情,就是無限接近于100%。而除了DMS系統(tǒng),激光雷達和4D成像毫米波雷達現(xiàn)在也開始逐步走向規(guī)模化,能夠有助于快速降低車輛感知系統(tǒng)“無法識別靜態(tài)障礙物”的事故發(fā)生率。

當(dāng)前,很多國產(chǎn)智能汽車開始量產(chǎn)搭載激光雷達。雖然相關(guān)的技術(shù)路線很多,有轉(zhuǎn)鏡式、MEMS微振鏡式等等,但都是為了補齊視覺攝像頭、毫米波雷達的短板。
因為激光雷達,簡單理解就是提供帶實時距離信息的高分辨率數(shù)據(jù)。畢竟毫米波雷達雖然有深度信息但分辨率太低,視覺攝像頭分辨率高但不帶深度信息,視覺感知+毫米波雷達融合,本身就是事故頻發(fā)的罪魁禍?zhǔn)住?/p>
相比之下,激光雷達可以主動發(fā)射紅外激光脈沖。不同于攝像頭對光線的被動接收,激光雷達通過每秒發(fā)射的數(shù)百萬個脈沖,在空間坐標(biāo)中形成數(shù)百萬個點,勾勒出空間中的一切物體細(xì)節(jié),準(zhǔn)確識別視野中所有物體的三維空間位置,即所謂的點云。
另外在探測距離上,激光雷達也有一定優(yōu)勢。以禾賽AT128為例,128線的激光雷達擁有200米的感知能力。而作為對比,小鵬P7低配2.5版的車型上,用的前置毫米波雷達型號為博世MRR evo14,擁有廣角/窄角兩種探測角度,探測距離分別為100米和160米。
哪怕是早一毫秒看到物體,也能早以毫秒下達剎車指令。
不過,激光雷達對于一些霧霾、暴雪等惡劣天氣仍存在不足。如何讓車輛傳感器看得更遠更準(zhǔn),依舊是整個汽車乃至科技產(chǎn)業(yè)正在不斷研究的問題。
與此同時,另外一個技術(shù)也悄然興起,這便是4D毫米波雷達。它延續(xù)了傳統(tǒng)毫米波雷達全天候運行的優(yōu)勢,還增加了俯仰角信息,同樣能形成點云圖像。這意味著,今后毫米波雷達不僅也可以檢測到物體的距離、相對速度和方位角,還可以檢測到前方物體的垂直高度以及前方靜止和橫向移動物體。
理論上,激光雷達和4D毫米波雷達,都可以識別出障礙物的輪廓、類別并進行行為感知和預(yù)判。如果這次事故的肇事車上能具備這兩項技術(shù),那么人的生命可能還有機會得以保護。
寫在最后
長期來看,關(guān)于輔助駕駛的更宏大課題,在于“如何做好更安全的人機共駕?”
實際上,任何車企在推行輔助駕駛類功能時,都會在產(chǎn)品說明中寫到類似話:“駕駛員需要隨時準(zhǔn)備介入車輛,以保證行駛安全。”
但何時交給駕駛員接管,在接管后駕駛員應(yīng)該作出怎樣的正確操作,每一家車企都有不盡相同的功能和規(guī)則設(shè)計。
同時,監(jiān)管部門也沒有對“駕駛員接管車輛”這一操作作出比較明確的限制。此外,即使在很多專業(yè)汽車媒體的評價體系中,也很少見到對于駕駛員行為檢測功能的測評。
更尷尬的是,當(dāng)前中國市場的新車中,DMS(駕駛員監(jiān)控系統(tǒng))系統(tǒng)的滲透率只有3.9%。所以,目前市面上仍然有很多具備輔助駕駛類功能的車型,并沒有強制的措施去監(jiān)管駕駛員分神的行為。
說句危言聳聽的話:在如今大部分車上,輔助駕駛和危險駕駛,也許只存在于駕駛員的一念之間。



“掌”握科技鮮聞 (微信搜索techsina或掃描左側(cè)二維碼關(guān)注)











