

小鵬智能駕駛致命車禍:高速撞向靜止車輛,光線良好,系統里里外外失效

歡迎關注“新浪科技”的微信訂閱號:techsina
文/賈浩楠
來源:智能車參考(ID:AI4Auto)
一起嚴重的智能駕駛直接相關事故,剛剛被證實。
高速道路上,據說是道路檢修車停在高速左側車道上,而另一輛開啟智能駕駛的車輛完全識別失敗,沒有任何減速動作以80km/h的速度撞了上去。
而且是在白天光線良好,路況良好的情況下。
令人痛心的是,事故發生瞬間,拋錨車車主正站在車尾,猝不及防被后車正面夾擊沖撞:

根據最新消息,被撞者已不幸遇難。
而從流出的現場視頻和其后證實來看,肇事車輛,小鵬P7。
并且進一步得到證實的是,當時車輛處于智能駕駛狀態,小鵬的智能駕駛系統沒有及時檢測到前方停車,也沒有及時主動剎車,車主似乎也完全沒有得到提示和反饋,并且當時也沒有把注意力放在路況上。
種種條件之下,悲劇沒能避免。
事故因何發生
從現場視頻看,事故發生原因不復雜。
被撞的車據說是道路檢修車,停在了高速最左側的超車道上。

根據現場視頻來看,停放的車沒有放置三腳架,隱約能看到雙閃。

根據網絡上流傳的疑似小鵬車主本人的聊天記錄表明,他當時開啟了智能駕駛功能,具體應該是包括LCC(車道保持)、定速巡航功能在內的基礎L2級系統,但并不是小鵬NGP。
車主本人自述,當時剛好走神,沒留意到前方的故障車輛。
而就在駕駛員對路況、車況都沒有有效監管的情況下,小鵬的智能駕駛系統失效了,根本沒能識別高速上的靜止目標,以80km/h的時速撞了上去。

為什么判定是系統失效?
因為車主還表明,以前也出現過高速行駛中的突發情況,但系統會報警提醒駕駛員。這一次無論是提醒接管,還是AEB等等主被動安全措施都沒激活。
后果很嚴重。從視頻上看,前車車主先是被撞飛,又重重落在后風擋和尾廂上,當場失去意識。

最新的消息是,被撞的這位,已經不幸遇難。
為何視而不見
這么大一車和人的目標,為什么識別失敗?
現款小鵬P7,采用的是視覺為主的融合感知方案,具體搭載了13個攝像頭、5個毫米波雷達和12個超聲波雷達。
底層算力來自英偉達Xavier,算力30TOPS。
根據肇事車主本人的表述,他的小鵬P7目前已經更新到XPilot3.0系統,這也是需要額外花費3.6萬元選裝的。

按照官方描述,XPilot3.0可以通過高精地圖和車上傳感器,實現自動超車、自動限速調節、最優車道選擇、自動切換高速公路、自動上下匝道、變道自動緊急避讓等功能。
并可以在錐桶識別與避讓、大貨車規避、夜間超車提醒、故障車輛避讓、擁堵道路跟車等國內行車場景下擁有較好的表現。
但事故還是發生了。
哪個傳感器需要對這次失效負責?
超聲波雷達?本身探測距離有限,主要服務于泊車場景,所以跟本次事故并無直接關系。
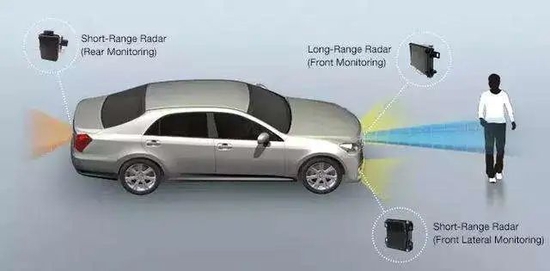
直接相關的,是車上的負責識別目標的攝像頭和感知測距的毫米波雷達。

具體地說,是現款P7上負責前向感知的三顆不同視角、分辨率的攝像頭,以及一顆前向毫米波雷達。
三顆前向攝像頭,職責不同:
遠距感知 HFOV 28:窄視角的前向攝像頭,1828*948的分辨率,15fps,150m以上的路面情況,用于AEB(自動緊急剎車)、ACC(自適應巡航)和前向碰撞預警。
中距感知 HFOV 52:主前向攝像頭,有效距離30-70米之間,用于交通信號燈檢測(會看紅綠燈)、AEB、ACC、前向碰撞預警和車道感知;
近距感知 HFOV 100:寬視角的前向攝像頭,40米范圍以內,用于交通信號燈檢測(會看紅綠燈、應該是輔助主前向攝像頭的)、雨量檢測(自動雨刮要靠它)和防加塞(看的角度更廣)。
而毫米波雷達,則是博世提供,有效探測距離至少200米左右。
按照80km/h的速度、毫米波雷達最少200米探測距離計算,這次事故中,留給系統的反應時間至少是9s。

真的不算短了。甚至對人類司機,有9秒、200米的窗口期,絕對能避免事故。
但小鵬P7上的毫米波雷達、遠距感知、中距感知攝像頭至少三重冗余先后失效。
而且類似的事故,之前蔚來和理想也都發生過,還一度引發討論——毫米波雷達的適用工況,比如時速超過80KM。
但在這起小鵬的事故里,時速沒有超過80。
當然別忘了,失效的還有DMS駕駛員監控系統。
就在前兩天,小鵬還因“車主眼睛小被誤判注意力不集中”而上了一波熱搜,向公眾宣傳了一波DMS系統的“嚴謹”程度。

但事實證明,現實考驗中,小鵬汽車的DMS遠達不到“有效嚴謹”的程度。
而且也有小鵬車主認為這是一次炒作,因為實測過程中,無論是NGP還是LCC輔助駕駛過程中,被監測的主要是方向盤上的握力感應。
該車主把DMS攝像頭遮蔽,但并未影響使用——說明攝像頭可能并未啟用。

所以智能車進程中,會說會炒作可能會擴大品牌影響力,但最終還是得經得起現實考驗。
誰的責任?有啥警示?
責任劃分,其實沒有太多異議。
小鵬在給用戶交付智能駕駛系統時,已經明確過免責條款。并且會向用戶說明輔助駕駛不等于無人駕駛,司機需要時刻保持注意力集中,隨時準備接管系統。
使用相關功能前,小鵬也會強制用戶完成智能駕駛相關安全教育培訓。
所以,這次造成事故的主要責任,是在小鵬P7車主。

小鵬方面的回應全文是這樣:
經核實,8月10日下午,寧波一車主駕駛車輛與前方檢查車輛故障人員發生碰撞,發生人員傷亡。我們為本次事故中不幸離世的遇難者感到悲痛和惋惜。目前交警部門已經立案處理,門店已第一時間已前往現場協助處理。我們將全力配合相關部門進行事故調查,持續跟進后續結果,并協助客戶處理后續相關事宜。
但是這次悲劇的發生,對我們普通用戶則是警示。
首先,自動駕駛系統永遠不可能做到100%零事故,即使是將來L4、L5高階系統量產。
自動駕駛存在的意義,從來不是杜絕交通事故的發生。而是在數學概率上,系統的可靠程度超過人類司機,由此帶來社會層面的交通效率、安全性的整體改善。
而在現階段,尤其是類似這次的事故一再證明,輔助駕駛階段存在著局限。
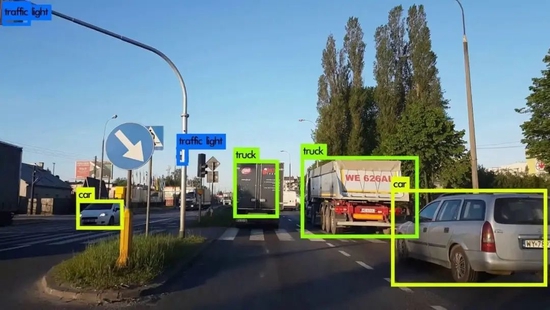
純視覺感知,對于靜止物體識別有缺陷。無論是特斯拉,還是其他自動駕駛公司的產品,都不能完全保證避免漏檢錯檢。
尤其是這次案例中,人站在車尾,可能形成了一個系統從來沒見過的“異形物”,而之前AI可能并沒有接受過針對這類異形物的訓練。
而作為冗余的前向毫米波雷達,其實本身就具有高速場景下性能不足的缺點,這也是為何馬斯克想要取消特斯拉上唯一一個毫米波雷達的原因。
算法、傳感器都有不足,那應該怎么辦?
從產品角度講,增加激光雷達,可能是目前一個較為現實的方案。至少,激光雷達的探測光線,碰到障礙物一定會產生回波,這就在感知層面多了一層冗余,數據層面消除了“看不到”的隱患。
不過,現階段避免事故的最有效方法,還是在我們用戶。
智能駕駛當然可以用,也能切實減輕駕駛負擔,但要切記:
手要放在方向盤,眼睛盯著路前方。

(聲明:本文僅代表作者觀點,不代表新浪網立場。)

作者簡介



