

不僅會(huì)前、后空翻,還能跨欄、桶滾......MIT“迷你獵豹”機(jī)器人成功模仿人類
 play
play
來源:新智元
長期以來,仿真機(jī)器人似乎總是難以達(dá)到、甚至超越人類般的運(yùn)動(dòng)敏捷程度,人們對(duì)機(jī)器人的印象基本是“鐵塊頭”、笨拙、運(yùn)動(dòng)遲緩......如何制造一個(gè)可以在平坦路面上行走,而且不會(huì)摔倒,甚至可能偶爾爬爬樓梯的雙足機(jī)器人,一直以來都是科學(xué)家們面臨的一個(gè)難題。
事實(shí)上,人們?cè)谶@一領(lǐng)域已經(jīng)取得了眾多突破性成果。例如,在波士頓動(dòng)力等公司的努力下,如今的雙足機(jī)器人至少能達(dá)到人類的運(yùn)動(dòng)技能。而下一個(gè)目標(biāo),就是突破人類表演極限——特技。
近日,來自麻省理工學(xué)院的研究人員研發(fā)了一種特技機(jī)器人,通過一些步態(tài)探索和簡(jiǎn)單的四條腿特技,希望讓未來機(jī)器人的肢體運(yùn)動(dòng)更加精細(xì)化。具體而言,這種特技機(jī)器人身高約為 0.7 米,體重約為 21 公斤,很像一只直立版的迷你獵豹。

高顏值“迷你獵豹”
項(xiàng)目研究成員、麻省理工學(xué)院研究生 Matthew Chignoli 表示,盡管從軀干和手臂來看,它的外觀像是一只直立版的迷你獵豹,但它的腿部設(shè)計(jì)是全新的,重新設(shè)計(jì)的執(zhí)行器具有更高的功率和更好的扭矩密度。
"腿部設(shè)計(jì)的主要重點(diǎn)是實(shí)現(xiàn)在人類行走和跑步中發(fā)生的平穩(wěn)但靈活的'腳跟到腳趾'動(dòng)作,同時(shí)保持低慣性,以便與地面進(jìn)行流暢的互動(dòng)。"
事實(shí)上,動(dòng)態(tài)腳踝動(dòng)作在仿真機(jī)器人中很少見,此次研究人員希望設(shè)計(jì)出健壯、低慣性和強(qiáng)大的腿部,從而模仿人類腿部動(dòng)作。
研究人員表示,該機(jī)器人的腿部有五個(gè)定制的執(zhí)行器:三個(gè)位于臀部,一個(gè)位于膝蓋,還有一個(gè)用于控制腳踝的轉(zhuǎn)動(dòng)。膝蓋、腳踝和關(guān)節(jié)均有一個(gè)皮帶傳動(dòng)系統(tǒng),以在這些關(guān)節(jié)提供更高的扭矩。五個(gè)執(zhí)行器使得每條腿在每只腳上產(chǎn)生三維地面反作用力,以及每只腳的轉(zhuǎn)動(dòng)和偏航軸的力矩。
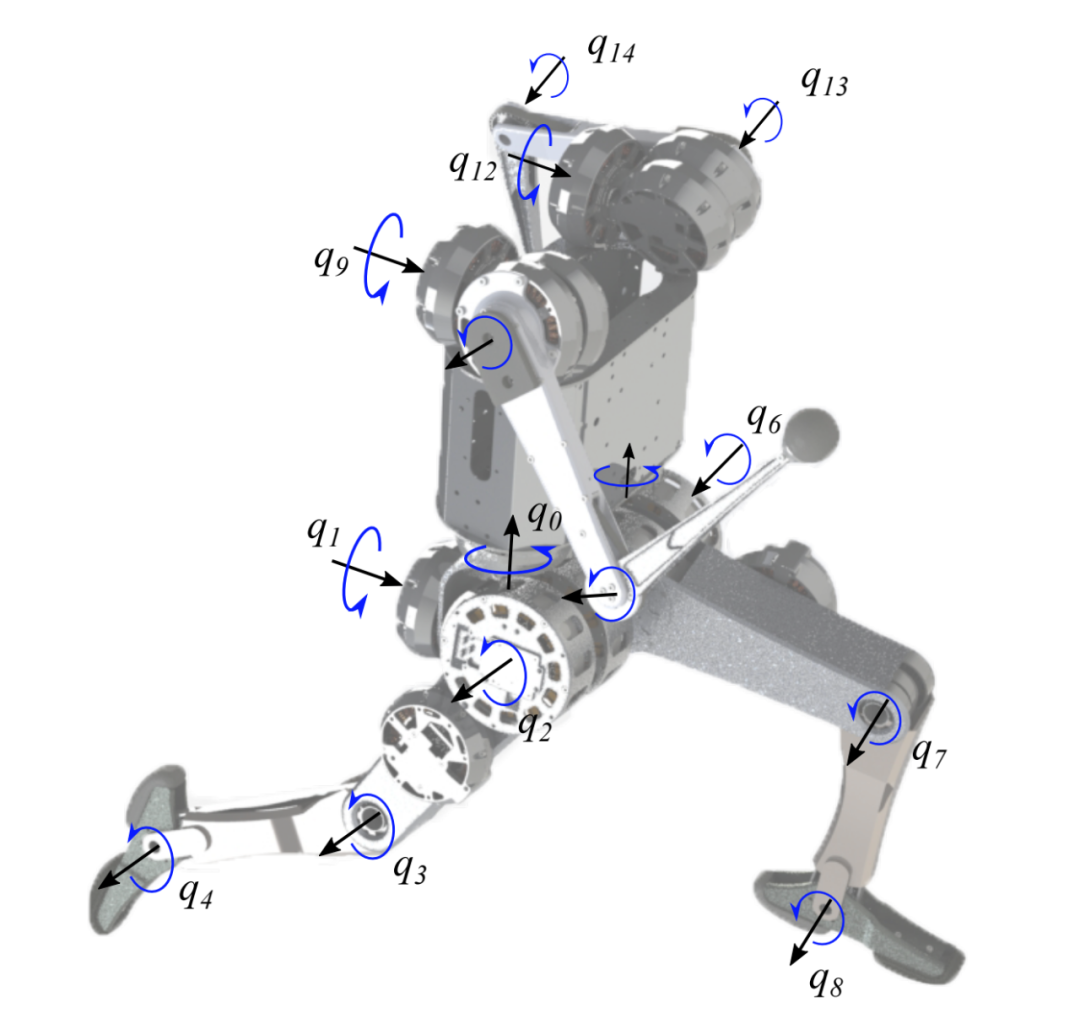
圖|特技機(jī)器人擁有 5 個(gè)自由度的腿和 3 個(gè)自由度的手臂,踝關(guān)節(jié)只有俯仰方向驅(qū)動(dòng),兩個(gè)接觸傳感器分別位于腳尖和腳后跟(來源:arXiv)
據(jù)了解,系統(tǒng)將由高性能60V、3Ah電池組供電。每只腳的后跟和腳趾上都裝有四個(gè)無線接觸傳感器,用于檢測(cè)接觸時(shí)間。性能與規(guī)格如下:

圖|特技機(jī)器人的執(zhí)行器規(guī)格
完美后空翻:起飛、飛行、著陸
此前研發(fā)團(tuán)隊(duì)開發(fā)的機(jī)器人設(shè)計(jì)模式,包含轉(zhuǎn)矩密集型電機(jī)、高帶寬力控制和通過后驅(qū)動(dòng)緩解沖擊的功能。這種設(shè)計(jì)模式使得機(jī)器人產(chǎn)生翻騰至空中所需的脈沖,同時(shí)確保機(jī)器人運(yùn)動(dòng)時(shí)的穩(wěn)定性,從而可靠控制機(jī)器人在著陸時(shí)發(fā)生的高速撞擊。這些設(shè)計(jì)原則如今也首次用于特技機(jī)器人的設(shè)計(jì)中。
為了充分發(fā)揮機(jī)器人在脈沖運(yùn)動(dòng)中的動(dòng)態(tài)能力,研究人員研發(fā)了一種新的 Kino 動(dòng)態(tài)規(guī)劃器,有效地處理了機(jī)器人的執(zhí)行器極限,同時(shí)采用了分層控制框架,有效地將模型預(yù)測(cè)控制和全身控制相結(jié)合,從而實(shí)現(xiàn)跳躍后的穩(wěn)定著陸。
在先進(jìn)原理和精密電機(jī)的加持下,仿真機(jī)器人實(shí)現(xiàn)了“驚險(xiǎn)的跳躍”。仿真機(jī)器人的“后空翻”運(yùn)動(dòng)分為三個(gè)階段:起飛、飛行和著陸。


圖|規(guī)劃和控制框架
Kino動(dòng)態(tài)規(guī)劃、基于MPC的著陸控制和WBIC框架,實(shí)現(xiàn)仿人機(jī)器人的動(dòng)態(tài)空中運(yùn)動(dòng)
起飛階段,是通過新研發(fā)的驅(qū)動(dòng)感知 Kino 動(dòng)態(tài)規(guī)劃(AAKD)進(jìn)行的。AAKD 規(guī)劃的第一個(gè)步驟是運(yùn)動(dòng)選擇,它基于對(duì)地形和任務(wù)的評(píng)估,為機(jī)器人選擇必要的運(yùn)動(dòng)(例如跳到桌子上、做一個(gè)后空翻等)。第二步驟是基于質(zhì)心動(dòng)力學(xué)的軌跡優(yōu)化,為機(jī)器人找到一條可行的軌跡;
飛行階段,機(jī)器人的關(guān)節(jié)簡(jiǎn)單地使用PD控制,由AAKD規(guī)劃器確定配置;
著陸階段,是維持機(jī)器人運(yùn)動(dòng)的穩(wěn)定性是一個(gè)關(guān)鍵,著陸階段的模型設(shè)置是本次研究的重大突破。在以前的工作中,WBIC與MPC共享相同的位置命令。麻省理工學(xué)院提出了一種基于簡(jiǎn)單集總質(zhì)量模型的預(yù)測(cè)控制(MPC)和基于瞬時(shí)高帶寬控制的全身脈沖控制(WBIC)相結(jié)合的遞階控制框架,WBIC將MPC中找到的最優(yōu)運(yùn)動(dòng)作為位置參考,并結(jié)合反作用力指令來充分利用最優(yōu)解。此外,只要不違反身體定向命令,WBIC將身體定向任務(wù)優(yōu)先于質(zhì)心動(dòng)量任務(wù),以跟蹤所需的質(zhì)心角動(dòng)量。通過這種精心設(shè)計(jì),仿真機(jī)器人在動(dòng)態(tài)空中運(yùn)動(dòng)后可以在地面穩(wěn)定著陸。
一旦機(jī)器人檢測(cè)到與地面完全接觸,著陸控制器就會(huì)啟動(dòng),并適當(dāng)吸收沖擊力和耗散動(dòng)能來開始穩(wěn)定機(jī)器人的平衡。這就需要高帶寬的反饋控制(WBIC),能夠在著陸運(yùn)動(dòng)中實(shí)現(xiàn)最佳運(yùn)動(dòng)。二次規(guī)劃(QP)的 MPC 規(guī)劃反作用力分布,使機(jī)器人穩(wěn)定降落至地面。在起飛和著陸階段,規(guī)劃的運(yùn)動(dòng)都是通過全身脈沖控制器來實(shí)現(xiàn)的。
期待人機(jī)共舞時(shí)刻來臨
一直以來,科學(xué)家都在實(shí)現(xiàn)機(jī)器人運(yùn)動(dòng)精細(xì)化的道路上不斷向前。2015 年,在 DARPA 機(jī)器人挑戰(zhàn)賽(DRC)上,一些仿真機(jī)器人脫穎而出,為下一代仿人機(jī)器人奠定了基礎(chǔ)。
除了此次來自麻省理工學(xué)院的“迷你獵豹”,IHMC 也曾開發(fā)出兒童大小的體操機(jī)器人,以著名體操運(yùn)動(dòng)員娜迪亞·科梅內(nèi)奇(Nadia)的名字命名,通過液壓系統(tǒng)為 Nadia 提供動(dòng)力,使得機(jī)器人可以像體操運(yùn)動(dòng)員一樣展示動(dòng)作的速度和力量,保持非常高的運(yùn)動(dòng)范圍。

如今,仿真機(jī)器人研究仍在繼續(xù),一方面我們追求機(jī)器人運(yùn)動(dòng)的精細(xì)化,另一方面我們力求機(jī)器人運(yùn)動(dòng)的穩(wěn)定性,如果兩者兼具,那么仿真機(jī)器人就能更廣泛地被應(yīng)用在人們的日常生活生產(chǎn)中,成為人類的好幫手。
或許,人與機(jī)器人“共舞”的那一天就要到來了。
參考資料:
https://spectrum.ieee.org/automaton/robotics/humanoids/mit-dynamic-acrobatic-humanoid-robot
https://arxiv.org/pdf/2104.09025.pdf
https://spectrum.ieee.org/automaton/robotics/humanoids/ihmc-developing-new-gymnastinspired-humanoid-robot
https://spectrum.ieee.org/automaton/robotics/humanoids/darpa-robotics-challenge-

(聲明:本文僅代表作者觀點(diǎn),不代表新浪網(wǎng)立場(chǎng)。)




