

有多少司機(jī)開著輔助駕駛玩手機(jī)?
歡迎關(guān)注“新浪科技”的微信訂閱號(hào):techsina
來源:遠(yuǎn)川研究所
8月10日,一輛正處于輔助駕駛狀態(tài)的小鵬P7撞上了一輛停在高速快車道的小車,導(dǎo)致一人當(dāng)場(chǎng)死亡。
根據(jù)官方的聲明,事發(fā)時(shí),一輛道路養(yǎng)護(hù)車正停在高架最左側(cè)(屬于違規(guī)操作),工作人員疑似在車尾作業(yè)時(shí),一輛P7在沒有減速的情況下徑直撞上了前方車輛,導(dǎo)致作業(yè)人員被撞飛。
小鵬被公認(rèn)為是國(guó)內(nèi)自動(dòng)駕駛水平最高的公司之一。
事實(shí)上,對(duì)于現(xiàn)階段的輔助駕駛系統(tǒng)來說,準(zhǔn)確識(shí)別出一個(gè)非規(guī)則的靜止物體,并且及時(shí)做出正確反應(yīng)絕對(duì)是一道地獄級(jí)的難題,這也是類似事故這兩年層出不窮的原因。
8月8日,一輛理想ONE在開啟NOA(導(dǎo)航輔助駕駛)時(shí)撞上高速路工程車。去年8月,一輛蔚來ES8也在輔助駕駛狀態(tài)下撞擊正在作業(yè)的工程車,車主不幸罹難。而特斯拉則在相似場(chǎng)景下涉入了更多致命事故。
高速道路上的靜止物體,幾乎已成輔助駕駛的致命場(chǎng)景。
01
攝像頭+毫米波雷達(dá)=青蛙眼?
當(dāng)下所有擁有輔助駕駛功能的車型,都會(huì)標(biāo)配AEB(自動(dòng)緊急制動(dòng))功能,目的是防止追尾,減輕碰撞。
但問題在于,AEB生效的條件比較嚴(yán)苛——應(yīng)對(duì)加塞容易失效,對(duì)靜止物體容易失效,車速超過一定范圍(通常是60km/h-80km/h)也可能失效。
輔助駕駛為何如此矯情?一般認(rèn)為,感知系統(tǒng)能力的孱弱要背大鍋。
8月10日涉事的小鵬P7硬件規(guī)格放到現(xiàn)在并不算高,XPILOT 2.5系統(tǒng)搭載了5個(gè)攝像頭、3個(gè)毫米波雷達(dá),其計(jì)算平臺(tái)采用了英偉達(dá)上一代自動(dòng)駕駛芯片Xaiver,峰值算力為30TOPS(行業(yè)一般認(rèn)為L(zhǎng)3及以上自動(dòng)駕駛需要數(shù)百至上千T算力),負(fù)責(zé)高速場(chǎng)景的主傳感器為一枚毫米波雷達(dá)和單目攝像頭。
而在事發(fā)時(shí),兩種傳感器因?yàn)楦髯缘木窒蓿茨芗皶r(shí)識(shí)別停靠的作業(yè)車。
理想汽車創(chuàng)始人李想曾說:“攝像頭 + 毫米波雷達(dá)的組合像青蛙的眼睛,對(duì)于動(dòng)態(tài)物體判斷還好,對(duì)于非標(biāo)準(zhǔn)的靜態(tài)物體幾乎無能。”
其中,毫米波雷達(dá)能夠測(cè)量與前方物體的距離,但探測(cè)不到物體高度,信息密度低。若對(duì)其過于信任,則會(huì)造成輔助駕駛“草木皆兵”,“幽靈剎車”的現(xiàn)象頻發(fā)。
為降低誤觸發(fā)率,如今毫米波雷達(dá)通常會(huì)在高速上設(shè)置為自動(dòng)過濾靜止目標(biāo)。因此,毫米波雷達(dá)即使發(fā)現(xiàn)了前方的靜止物體,要么會(huì)視而不見,要么很難及時(shí)做出反應(yīng)。
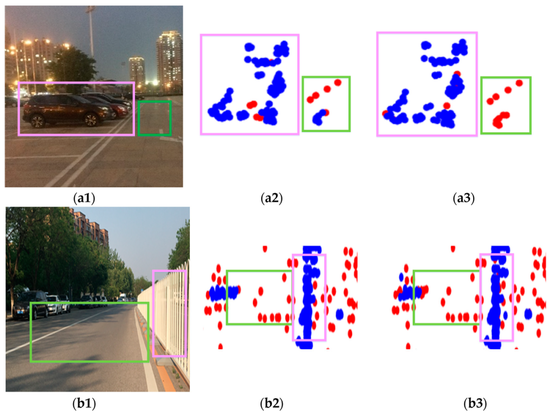 右為傳統(tǒng)毫米波雷達(dá)探測(cè)點(diǎn)云,依靠這樣的數(shù)據(jù)做精確識(shí)別不現(xiàn)實(shí)
右為傳統(tǒng)毫米波雷達(dá)探測(cè)點(diǎn)云,依靠這樣的數(shù)據(jù)做精確識(shí)別不現(xiàn)實(shí)單目攝像頭則難以精確測(cè)距,其感知環(huán)境依賴深度學(xué)習(xí)驅(qū)動(dòng)的視覺識(shí)別,需要大規(guī)模的數(shù)據(jù)訓(xùn)練。如果某個(gè)場(chǎng)景或物體的訓(xùn)練數(shù)據(jù)不夠,攝像頭可能會(huì)當(dāng)做物體不存在,或?qū)⑵湔`識(shí)別為路面、天空等背景。
2016、2020、2021年,三輛特斯拉在開啟Autopilot后均撞上了橫亙?cè)诘缆飞系陌咨ㄜ嚒J鹿试蛘{(diào)查皆指向攝像頭:它把卡車的白色車廂認(rèn)成了天空[1]。
而在國(guó)內(nèi),造型迥異的作業(yè)車則成了新勢(shì)力們共同的夢(mèng)魘。在小鵬P7涉及的事故中,被撞車輛是一輛普通轎車,人員則在事發(fā)時(shí)站在車后,更加大了識(shí)別難度——攝像頭能分別識(shí)別人類與車輛,但兩者疊在一起,特征發(fā)生干涉,對(duì)攝像頭來說成了一個(gè)全新的物體。
作為一個(gè)人類會(huì)覺得這很荒謬,但其實(shí)類似的案例并不鮮見——貼在車上的廣告人像,會(huì)被輔助駕駛系統(tǒng)識(shí)別成奔跑時(shí)速60公里的真人。

除此之外,視覺識(shí)別算法通常需要運(yùn)行一段時(shí)間得出結(jié)果,耗時(shí)長(zhǎng)的需要數(shù)百毫秒[2]。面對(duì)靜止物體,識(shí)別時(shí)間可能會(huì)進(jìn)一步延長(zhǎng)至2-4秒多。在80km/h車速下,車輛在此時(shí)間可開出44-88米,系統(tǒng)容錯(cuò)率被進(jìn)一步降低[3]。
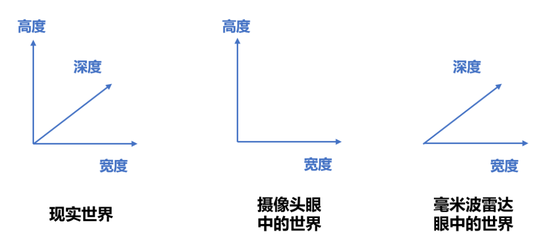
某種程度上,現(xiàn)有輔助駕駛大多數(shù)時(shí)候都在依靠單目攝像頭加傳統(tǒng)毫米波雷達(dá)兩個(gè)“二維生物”認(rèn)識(shí)世界——攝像頭看不到深度,毫米波雷達(dá)測(cè)不到高度。但問題在于,現(xiàn)實(shí)是復(fù)雜的三維,輔助駕駛需要人類這個(gè)智慧的三維生物來兜底。
遺憾的是,常常有過于樂觀的駕駛員試圖強(qiáng)行讓輔助駕駛系統(tǒng)完成“升維打擊”,將其作為無人駕駛系統(tǒng)使用。
02
軟硬升級(jí),就萬事大吉?
過去兩三年,車企用數(shù)十至數(shù)百T大算力芯片、三十乃至四十個(gè)傳感器的配置刺激著用戶的神經(jīng)。
但很少有用戶意識(shí)到,車輛算力、傳感器數(shù)量翻倍并不代表輔助駕駛能力翻倍,一方面,這是因?yàn)樗懔κ切旭偘踩谋匾浅浞謼l件,另一方面是因?yàn)樵谔囟▓?chǎng)景下,真正派得上用場(chǎng)的傳感器往往只是少數(shù)。
在2021年蔚來ES8的碰撞事故中,車輛搭載了24枚傳感器,包括一個(gè)三目攝像頭,4個(gè)環(huán)視攝像頭,5個(gè)毫米波雷達(dá)以及12個(gè)超聲波雷達(dá)。盡管配置武裝到牙齒,但在高速行駛時(shí),能對(duì)前方有效探測(cè)的,只有三目攝像頭與一枚前向毫米波雷達(dá)。
理論上,多目攝像頭能夠通過視差形成立體視覺,獲得三維感知能力,但由于算力要求、可靠性、感知距離等限制,蔚來ES8的三目攝像頭并沒有采用立體視覺算法,實(shí)質(zhì)是三個(gè)單目(類似于手機(jī)的長(zhǎng)焦、中焦、廣角)的疊加。
本質(zhì)上,這和主流輔助駕駛硬件并無代差。
因此,特斯拉和新勢(shì)力們今年新產(chǎn)品的重點(diǎn)發(fā)力方向,并非單純堆疊傳感器數(shù)量,而是提升傳感器質(zhì)量、完善傳感器融合、升級(jí)軟件算法,讓智能汽車能夠“活在三維空間”,以輔助駕駛的形態(tài)錘煉自動(dòng)駕駛的能力。
特斯拉選擇純視覺路線,重構(gòu)算法框架,使用AI加持的攝像頭來測(cè)距,利用深度學(xué)習(xí)算法將多枚高清攝像頭采集的二維圖像轉(zhuǎn)化為鳥瞰三維圖。
但這一路徑仍依賴大量數(shù)據(jù)訓(xùn)練,特斯拉向小部分車主先推送的測(cè)試版FSD(Full Self-Driving,特斯拉稱完全自動(dòng)駕駛系統(tǒng),但被美監(jiān)管機(jī)構(gòu)認(rèn)定為輔助駕駛),其駕駛水平與人類差距仍然明顯,不認(rèn)路、撞邊柱的情況并不罕見。
 特斯拉FSD勇撞邊柱,老師傅救車不及
特斯拉FSD勇撞邊柱,老師傅救車不及相較于劍走偏鋒的特斯拉,其他企業(yè)傾向于采用攝像頭、毫米波雷達(dá)、激光雷達(dá)多傳感器搭配的路線。
其中,高清攝像頭因有助于提升識(shí)別能力,已普遍配置在國(guó)內(nèi)L2級(jí)輔助駕駛系統(tǒng)上。
而在毫米波雷達(dá)領(lǐng)域,為應(yīng)對(duì)傳統(tǒng)毫米波雷達(dá)信息質(zhì)量不高的問題,博世、大陸、華為、傲酷等公司研發(fā)了具備三維感知能力的4D毫米波雷達(dá)。不過該技術(shù)成熟度不高,目前尚未量產(chǎn),此外其分辨率相較攝像頭與激光雷達(dá)處于劣勢(shì)。
在此背景下,激光雷達(dá)成為今年熱度最高的智能駕駛傳感器。
激光雷達(dá)通過發(fā)射脈沖激光、檢測(cè)反射信號(hào)來測(cè)量與物體之間的距離,建立周圍環(huán)境的三維模型。高線束的激光雷達(dá)既有探測(cè)距離遠(yuǎn)、測(cè)距準(zhǔn)的優(yōu)勢(shì),也有較高角分辨率。這些特點(diǎn)讓激光雷達(dá)很難對(duì)橫亙?cè)诼分械拇篌w積靜止物體視而不見。
在蔚小理的第二代平臺(tái)車型和長(zhǎng)安阿維塔、上汽智己等高端車型上,均配備了激光雷達(dá),作為升級(jí)輔助駕駛的重要手段。
 蔚來ET7激光雷達(dá)感知效果
蔚來ET7激光雷達(dá)感知效果只是激光雷達(dá)并非萬能,其在強(qiáng)光、雨天環(huán)境下的探測(cè)能力都會(huì)受到影響,此外由于數(shù)據(jù)樣本較少,激光雷達(dá)的識(shí)別算法仍然不夠成熟。
在一個(gè)多傳感器的智能汽車感知架構(gòu)中,攝像頭、毫米波雷達(dá)、激光雷達(dá)的信號(hào)如何融合、置信,也依然是待解的難題。
而上述一系列配置是只是為了解決自動(dòng)駕駛中的感知難題,在其之后,還有規(guī)劃、控制、執(zhí)行環(huán)節(jié)的技術(shù)問題待解。
這可能意味著在相當(dāng)一段時(shí)間里,車主都要帶著復(fù)雜的情感使用輔助駕駛——一方面作為主人,享受其對(duì)駕駛?cè)蝿?wù)的減負(fù);另一方面,又不得不作為保姆,小心翼翼地監(jiān)護(hù)這個(gè)不成熟的系統(tǒng),防止其宕機(jī)造成不可挽回的后果。
03
用戶教育比技術(shù)升級(jí)更難
前些年,自動(dòng)駕駛行業(yè)熱錢洶涌時(shí),從業(yè)人員熱衷于討論的都是 “無人駕駛出事時(shí)保車主還是保路人”這樣的未來主義電車難題。
但如今的事實(shí)證明,讓人民群眾學(xué)會(huì)如何正確使用輔助駕駛更加迫在眉睫。今年上半年,國(guó)內(nèi)L2級(jí)輔助駕駛滲透率已經(jīng)達(dá)到30%[4]。
而正如上文所言,輔助駕駛對(duì)駕駛者態(tài)度的要求其實(shí)充滿了哲學(xué)思辨:你不信則無意義,你太信可能付出生命。
2017年,谷歌旗下自動(dòng)駕駛公司W(wǎng)aymo發(fā)現(xiàn)人性終究會(huì)輸給這種考驗(yàn):其員工在測(cè)試輔助駕駛系統(tǒng)時(shí),熟悉功能后,會(huì)在時(shí)速90公里的車速下打盹、化妝、玩手機(jī),出狀況時(shí)根本無力接管[5]。
為此,Waymo緊急叫停輔助駕駛研發(fā),全力開發(fā)無人車[5]。盡管今天從商業(yè)上來看,Waymo因?yàn)檫@個(gè)決策屢遭嘲諷,但從道德或者風(fēng)險(xiǎn)規(guī)避的層面,很難指摘其選擇。
當(dāng)Waymo的無人車還在亞利桑那鳳凰城積累數(shù)據(jù)時(shí),某些車企則選擇先把輔助駕駛吹成自動(dòng)駕駛甚至是無人駕駛,再分期兌現(xiàn)。而在實(shí)際中,用戶將輔助駕駛有意無意當(dāng)做自動(dòng)駕駛使用乃至炫耀的行為并不鮮見。
 用戶演示:如何用一只橘子騙過某品牌輔助駕駛方向盤檢測(cè)
用戶演示:如何用一只橘子騙過某品牌輔助駕駛方向盤檢測(cè)這觸發(fā)了輔助駕駛的劇場(chǎng)效應(yīng)——當(dāng)一個(gè)人選擇站起身看戲,后面的人就沒法坐著。
當(dāng)一家車企可以每年都承諾“今年實(shí)現(xiàn)自動(dòng)駕駛”而不付出任何代價(jià),其他車企如果不跟進(jìn),就只能硬接對(duì)手的不正當(dāng)競(jìng)爭(zhēng)。
小鵬是眾多車企中較為典型的一個(gè):一方面大干快上,將“全棧自研”作為自身的核心競(jìng)爭(zhēng)力大肆宣傳;另一方面又謹(jǐn)小慎微,首創(chuàng)了輔助駕駛啟用前需考試等方法,并在車上配置了DMS(全稱Driver Monitor System,可在駕駛員疲勞、分神時(shí)予以提醒或退出輔助駕駛),引導(dǎo)車主正確使用功能。
但出于競(jìng)爭(zhēng)策略、成本、用戶隱私、體驗(yàn)等方面考慮,小鵬在內(nèi)的絕大多數(shù)車企對(duì)駕駛員濫/誤用輔助駕駛的約束都是軟性的,DMS主要提供聲音或震動(dòng)警告,且可關(guān)閉。換句話說,主要靠駕駛員自覺。
 小鵬P7 DMS攝像頭
小鵬P7 DMS攝像頭政策法規(guī)正在試圖遏制這種現(xiàn)象。歐盟E-NCAP要求,所有新車自今年7月開始必須強(qiáng)制安裝DMS。而在國(guó)內(nèi),自2018年政策要求“兩客一危”商用車強(qiáng)制安裝DMS后,乘用車出廠標(biāo)配DMS的規(guī)定據(jù)稱也在研究中[6]。
無論這個(gè)規(guī)定能否落地,何時(shí)落地,每一個(gè)司機(jī)都應(yīng)該在使用輔助駕駛時(shí)正視前方,握好方向盤,隨時(shí)準(zhǔn)備應(yīng)對(duì)突發(fā)情況。畢竟,再高級(jí)的輔助駕駛,也只是“輔助”駕駛。

(聲明:本文僅代表作者觀點(diǎn),不代表新浪網(wǎng)立場(chǎng)。)

作者簡(jiǎn)介




