




來源:DeepTech深科技
他叫朱飛虎,是給航天器造“眼睛”的人。
 圖 | 朱飛虎的照片(來源:朱飛虎)
圖 | 朱飛虎的照片(來源:朱飛虎)2021 年5 月 15 日,中國首款自主研發(fā)火星探測器“天問一號”,在火星成功完成軟著陸,這是中國第一次真正意義上的深空之旅,這意味著中國的火星探測能力直追美國,并成為首個利用單個探測器一次性完成“環(huán)繞+著陸+巡視”等任務的國家。
其中,火星著陸多功能避障敏感器(下稱“避障器”)承擔著重要作用,而它正是那雙“眼睛”。
朱飛虎表示,其擔任“天問一號”火星著陸多功能避障敏感器的主任設計師,并率領團隊于 2015 年著手研究避障器,2019 年 4 月將產(chǎn)品交付給整星,2020 年 7 月它跟隨“天問一號”探測器于發(fā)射入軌,后于 2021 年 5 月成功著陸火星烏托邦平原。
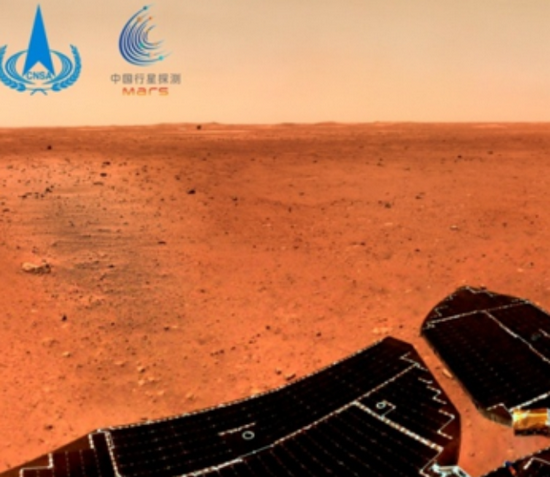
中國國家航天局對此評價稱:“著陸點附近地勢平坦,石塊豐度和尺寸與預期一致,表明著陸點自主選擇和懸停避障實施效果良好。”朱飛虎也因此獲得2021達摩院青橙獎,也成為該獎項設立以來的首位航天科學家得主。
讓“天問一號”度過火星著陸的“黑色9分鐘”
這雙“眼睛”讓“天問一號”度過了火星著陸的“黑色 9 分鐘”,以穩(wěn)穩(wěn)的姿勢降落在烏托邦平原。作為國際航天領域中最困難、失敗率最高的任務,火星軟著陸的成功率不到 50%。
火星距地球遠達 4 億公里,無法進行實時通信,因此在“天問一號”著陸火星的 9 分鐘里,工作人員無法進行地面干預,只能依靠探測器進行自主控制。由此可見火星著陸之難,歷史上許多國家都曾參與,但只有中美兩國完成了這一過程。
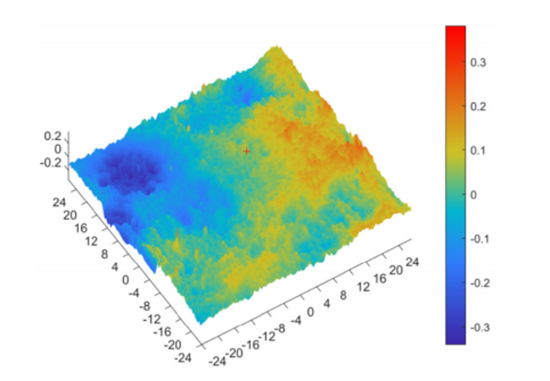 圖 | 激光精避障,水平 6.2m,垂直 4m(來源:朱飛虎)
圖 | 激光精避障,水平 6.2m,垂直 4m(來源:朱飛虎)
據(jù)朱飛虎介紹,NASA 一般采取如下兩種著陸方式:其一是氣囊著陸方式,利用打開的氣囊進行緩沖,借此來保護著陸車。其二是天空起重機方式,NASA 的好奇號火星探測器和新一代火星車毅力號均用此進行著陸。相比之下,我們選擇了軟著陸,這也是和中國探月工程相似的著陸方式。
對比 NASA 的著陸方式,軟著陸的不同主要有二:其一是大氣傘降,借助大氣空氣動力學讓速度降到較低水平。其二是拋掉探測器大底,露出視覺系統(tǒng)來做精確導航,這時再打開緩沖 7500 牛發(fā)動機,以進行動力減速,以便在傘降過程實現(xiàn)精確可控的減速。
在動力下降期間,探測器距離著陸地越來越近,當相距僅有 10 公里時,探測器要執(zhí)行精確導航,這時需要一雙“視力精準”的“眼睛”即多功能避障敏感器。
在用于“天問一號”探測器時,多功能避障敏感器主要有三大主要任務:首先,它要借助視覺系統(tǒng)光學成像模塊去規(guī)避背罩,當探測器拋完大底,降落傘和背罩會攜伴脫離探測器,它倆在脫離時的落點不能重復,否則會導致撞車現(xiàn)象。
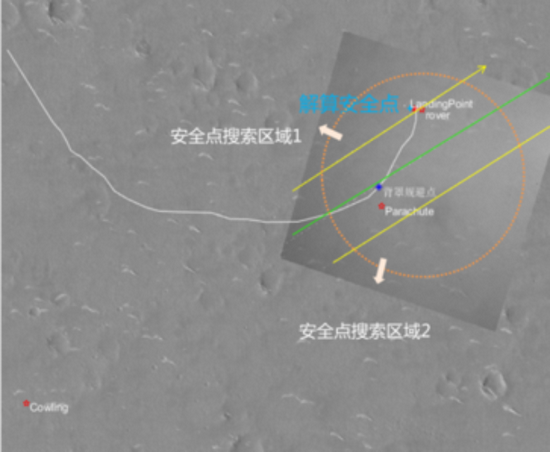 圖 | 背罩規(guī)避與光學避障(來源:朱飛虎)
圖 | 背罩規(guī)避與光學避障(來源:朱飛虎)
其次,利用視覺系統(tǒng)形成的初步避障,可讓著陸避開大型巖石、較大的隕石坑,從而保證祝融號火星車順利行走。再次,祝融號火星車的著陸腿比較細,一旦落在巖石或隕石坑上有可能會翻車。
在距離著陸地 100 米時,憑借多功能避障敏感器的激光三維成像,探測器可執(zhí)行懸停避障動作,從而規(guī)避尺度小于 0.2m 的小型巖石和隕石坑,借此進行精避障,以防止火星車落到巖石和隕石坑上。
 圖 | 整器懸停避障試驗(來源:朱飛虎)
圖 | 整器懸停避障試驗(來源:朱飛虎)
具體來說,光學成像模塊和激光成像模塊是多功能避障敏感器的兩大組成部分。它們主要承擔以下角色:第一,探測器背后的降落傘及金屬結構,它的別名叫背罩。由于背罩很大,假如探測器著陸點離它太近,背罩可能會纏住火星車,因此要設法做以規(guī)避。
第二,大型巖石和隕石坑也是被規(guī)避的對象。當探測器距離著陸點在3000米至10000米時,它要對障礙進行粗略識別,并規(guī)避半徑在百米級至公里級之間的大型障礙。而在火星著陸九分鐘中,著陸腿會在最后三分鐘伸出防熱大底,這時多功能避障敏感器也要識別火星表面的障礙。
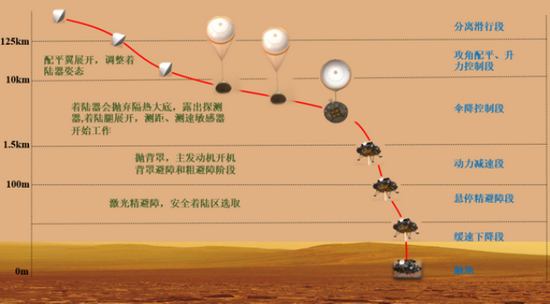 圖 | “天問一號”著陸點自主選擇系統(tǒng)(來源:朱飛虎)
圖 | “天問一號”著陸點自主選擇系統(tǒng)(來源:朱飛虎)
當探測器距離著陸地僅有一百米時,激光成像模塊可執(zhí)行更高精度的障礙規(guī)避,被規(guī)避對象是尺寸小于 0.2 米的石頭和隕石坑,借此讓火星車落到更平坦的地方,以防止其后續(xù)行為受限。概括來說,多功能避障敏感器的看家本領是給火星車選擇平坦的著陸區(qū)域。
月球車巡視和空間交會
視覺系統(tǒng)也可用于月球車巡視和空間交會上。當月球車在巡視時,視覺系統(tǒng)可幫它識別周圍地形地貌,從而做出精確規(guī)劃。月球車上還會搭載導航相機和避障相機,它和探測器的著陸相機有諸多相似之處,通過呈現(xiàn)立體三維圖像,讓行走中的月球車可以辨別并避開車輪邊的障礙,比如石子和凹坑等。
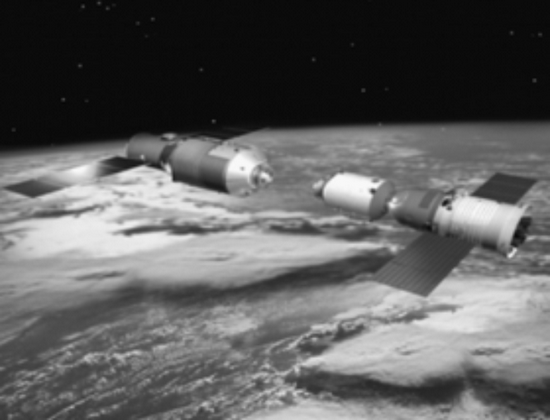 圖 | 交會對接(來源:朱飛虎)
圖 | 交會對接(來源:朱飛虎)
在航天器交會對接上,還要進行相對位置測量和姿態(tài)測量,當兩者接近時,不僅要完全對上相對位置,還要保證姿態(tài)配對,即只有面對面時才能成功對接。而對接精度的要求也很高,一般在毫米量級,角度要求則在零點幾度量級。
朱飛虎表示,視覺系統(tǒng)曾成功應用于天舟三號,在使用時它全面繼承了避障器系統(tǒng)的硬件,同時也對軟件做了迭代,以保證交會對接任務的順利完成。
在軟件上,他設計的著陸點自主選擇視覺導航算法,具備實時、魯棒等優(yōu)點,讓“天問一號”的成功軟著陸獲得更多保障。
據(jù)悉,該算法采用雙目視覺算法硬件化的方式,并用FPGA加以實現(xiàn),具備太陽高度角變化,自適應調(diào)整陰影和方差特征等能力。此外,他還建立了噪聲模型,讓以數(shù)字化地形、進行全工況模擬成為現(xiàn)實。未來,在“天舟四號”以及后續(xù)神舟系列飛船上都會用到。
此外,朱飛虎團隊參與研發(fā)的同類視覺產(chǎn)品——導航相機和避障相機,也已應用在祝融號火星車上。2021 年 5 月,祝融號火星車的拍攝影像公布,無論是彩色圖像、還是黑白避障圖像,均由導航相機和避障相機拍攝完成。嫦娥五號交會對接光學成像敏感器(下稱“敏感器”),則是朱飛虎團隊研發(fā)的另一款“眼睛”。2020 年底,中國首次月球采樣返回 1731g 月壤。
 圖 | 嫦娥五號交會對接成像敏感器相關示意圖(來源:朱飛虎)
圖 | 嫦娥五號交會對接成像敏感器相關示意圖(來源:朱飛虎)
當上升器與軌道器交會時,敏感器保障了 150m 的對接、以及平移靠攏段的進行,這一步也被稱為“千里穿針最后一步”,精度最高、難度最大,作為唯一的“眼睛”,敏感器作用之大不言而喻。
另一方面,朱飛虎帶領的空間激光類產(chǎn)品研制團隊也已成長起來,該隊伍也將在實施小天體探測任務、探月四期任務、空間站任務等重大航天任務承擔基石作用。
不過他也表示,相比國外同類產(chǎn)品,國內(nèi)避障器的主要不足分別來自視覺和激光兩方面。無論是視覺,還是激光,性能的提升主要受限于探測器芯片,而只有好芯片才能帶來高性能。和國產(chǎn)芯片廠商交流之后他發(fā)現(xiàn),相比國外先進傳感器的指標,國內(nèi)傳感器仍有一定差距。而在激光器上,雖說中國激光器的晶體材料已處于全球領先地位,但在激光器件的集成上,仍和國外有一定差距。
三步走:繼續(xù)深耕光電導航
朱飛虎是安徽安慶人,生于 1986 年,本科畢業(yè)于哈工大,后在清華獲得博士學位。9 歲時,他就開始閱讀天文學書籍,再加上爸媽都是理工科背景出身的教師,打小就給他講天文學故事,航天的“種子”早已播撒在心間。本科時,其就讀于哈爾濱工業(yè)大學,博士畢業(yè)于清華大學,期間一直學習電子科學與技術專業(yè)。
如今,他就職于北京控制工程研究所空間智能控制技術國家級重點實驗室,主要負責 GNC 分系統(tǒng)抓總單位,并承擔了 80% 以上的任務。截至目前,朱飛虎已發(fā)表論文 10 余篇,申請專利 20 余項,授權 11 項,并被評為航天五院青年拔尖人才、北京市科技新星候選人、北京控制工程研究所科技創(chuàng)新一等獎。
2024 年,中國即將發(fā)射小天體,這將是中國首次小行星探測任務,未來他也將擔任重要載荷與導航單機探測激光測繪導航系統(tǒng)負責人。
他表示,自己將繼續(xù)踐行航天精神,不斷深耕光電導航領域,具體分為三方面:其一是深入深空探測工程,從科學層面擴展人類認知;其二是參與北斗導航工程和衛(wèi)星互聯(lián)網(wǎng)工程,從社會層面服務于老百姓的生活;其三是將最先進的光電導航技術應用于航天裝備上,提升航天裝備的智能化控制水平。
與此同時,中國航天并不是一個封閉的系統(tǒng),也在日益走向開放。在小行星探測上,其團隊正和德國馬普所合作。小行星探測任務屬于科研探索項目,可能涉及小行星演化、生命起源等科學問題,相對來說比較開放。
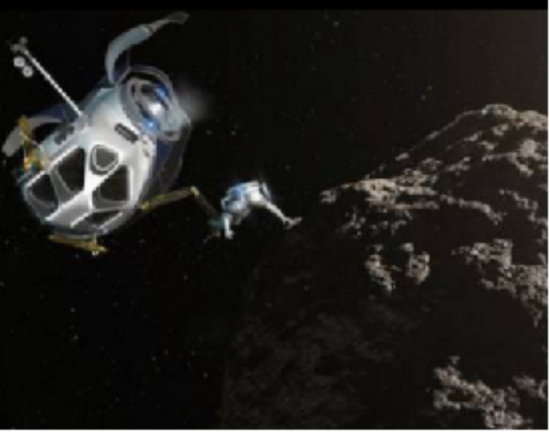 圖 | 小行星探測(來源:朱飛虎)
圖 | 小行星探測(來源:朱飛虎)因此在小行星探測任務中,朱飛虎團隊這邊也可開放載荷給國外同行,在數(shù)據(jù)處理上也可跟對方進行合作。在更加大眾的業(yè)界應用上,朱飛虎團隊依靠軒宇空間科技公司平臺,將視覺導航系統(tǒng)擴展應用于民用領域,有望在自動駕駛領域發(fā)揮重要作用。



“掌”握科技鮮聞 (微信搜索techsina或掃描左側二維碼關注)











