

特斯拉依舊頭鐵堅持視覺路線,激光雷達會笑到最后嗎?
 play
play
歡迎關注“新浪科技”的微信訂閱號:techsina
文/燕良
來源:腦極體
近日,馬斯克在特斯拉的AI日上大秀肌肉,人形機器人、超級計算機 Dojo的亮相,純視覺路線工作原理的展示,無不透露著其技術信心。在一眾廠商都選擇激光雷達方案作為視覺感知路線時,特斯拉依然堅持純視覺路線并且旗幟拉得更高往深處走了。
我們知道自動駕駛的底層原理是感知、決策、執行三個步驟的結合,感知層運用視覺傳感器獲得周圍路況信息,通過車身的設備端及云端處理數據并獲得執行命令,使得汽車獲得自動駕駛的能力。三個基本步驟中感知作為首要步驟,對后續的決策和執行起著先決作用。在感知層面上市場中目前有兩種技術路線:視覺感知與激光雷達感知。

激光雷達派認為,攝像頭做主導的視覺感知精度不夠,如果自動駕駛要發展到L3級別以上,就應當采用激光雷達。視覺感知派認為,攝像頭感知的環境信息數據豐富,并且可以對物體進行分類后續方便標注,最關鍵的是成本低廉,這些是激光雷達做不到的。
無論是從技術還是成本角度分析,兩種方案核心差異在于是否需要激光雷達的輔助,才有可能實現高級別自動駕駛。到底孰優孰劣,兩派爭論不休。那么,兩種技術路線究竟誰能笑到最后?
激光雷達vs視覺感知性能比拼
激光雷達感知技術是以激光雷達為主導,毫米波雷達、超聲波傳感器及攝像頭作為輔助。激光雷達感知環境的工作原理,是通過激光雷達發射激光束,測量激光在發射及收回過程其中的時間差、相位差,來確定車與物體之間的相對距離,實現環境實時感知及避障功能。

激光雷達具有較長的探測距離與較高的精準度,抗干擾能力強,可以主動檢測周圍多物體環境,獲取周圍環境點云構建3D環境模型。即使夜間光線不好,也不會影響探測效果。雖然激光雷達不怕暗光但是對于天氣敏感,雨雪、沙塵、大霧天氣等影響激光雷達識別效果。激光雷達融合高精地圖方案可有效彌補視覺方案環境依賴度高、算力需求大的缺陷,其性能優勢使得大多車廠將激光雷達列為面向L3級及以上級別自動駕駛不可或缺的感知器件。
視覺感知是以攝像頭為主導的方案,攝像頭成本相較激光雷達優勢極大。攝像頭的價格在幾十美元左右,而激光雷達在幾百美元,是其數倍。再者攝像頭技術逐漸成熟,高分辨率、高幀率成像技術使得感知的環境信息更為豐富,但攝像頭在黑暗環境中感知受限,精度及安全性有所下降。
例如特斯拉最為詬病的幽靈剎車故障,就是在一些隧道和大橋陰影處,因為攝像頭的結構原因,算法將突然出現的陰影當做障礙物導致車輛會突然自動減速,造成安全隱患。視覺方案中比較硬件性能,攝像頭功能被秒成渣渣。得益于軟件算法的加成,視覺方案才能依靠強大的算法保證圖像處理、決策執行的功能正常進行。
與激光雷達相比,視覺感知的弱點較為明顯:攝像頭依賴光線條件,感知方式精度較低,對算法、算力的依賴程度和要求極高,而數據的獲取及算法迭代壁壘高。性能方面激光雷達明顯勝出,特斯拉花費巨大的成本在算力和算法上,投入不小,一直頭鐵堅持視覺感知路線,到底是有哪些角度的考量呢?
特斯拉專注純視覺路線邏輯

在馬斯克看來,“純視覺感知才是通往真實世界 AI 的道路”,而這也是他解決問題奉行的底層思路——第一性原理,即回歸事物最基本的條件,將其拆分成各要素進行結構分析,從而找到實現目標的最優路徑。
在駕駛車輛的過程中,我們是通過眼睛收集路況信息輔以大腦處理的方式進行,那自動駕駛按理說也能通過視覺感知輔以算法處理的方式進行安全駕駛。特斯拉想要做的就是模仿人類視覺獲取信息的能力來實現自動駕駛。既然視覺攝像頭的感知方式精度較低,那么就依靠特斯拉獨有的數據優勢和構建算力、算法的能力來抹平這個缺陷。

數據方面,當其他自動駕駛廠商還在路測階段收集數據,特斯拉得益于在全球售出數百萬輛有攝像頭的汽車,已經積累了海量真實路況的數據。用于深度學習模型訓練的數據讓特斯拉的算法早已建立起壁壘,而這些數據樣本的積累速度與算法的效率其他廠商無法復制,只能干瞪眼瞎著急。
算力方面,特斯拉新建立的超級計算機 Dojo,擁有強大的算力,這個超級計算機就是為特斯拉的自動駕駛系統設立,用來集中力量訓練 Autopilot 在內的整個自動駕駛系統。
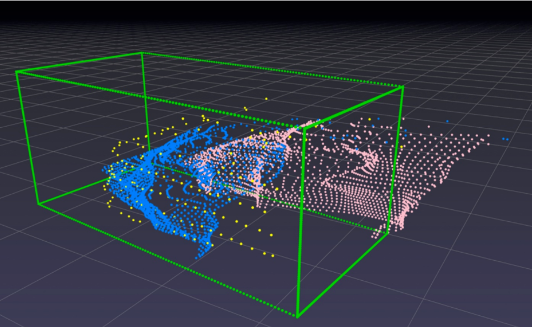
而在攝像頭的技術層面,特斯拉也進行了技術的革新,使用“偽激光雷達”技術代替,對攝像頭中的像素進行深度估計,類似激光雷達的點云功能一般形成3D目標檢測,提高了深度估計的準確性,激光雷達和相機之間的差距開始縮小。
人們駕駛車輛的時候依賴視覺,我們的神經網絡可以處理視覺信息中的距離、速度等信號,而特斯拉的神經網絡似乎也可以逐漸做到。特斯拉的視覺感知路線,逐漸在縮小與激光雷達方案的差距,但是其背后所付出的代價,讓后來者們無法跟隨復制,這也為特斯拉建立起強大的壁壘。純視覺方案以海量樣本數據訓練學習和先進的圖像處理算法算力支撐,注定是一個少數攀登者選擇的艱難路線。
特斯拉首席AI科學家Karpathy在今年CVPR 2021自動駕駛研討會上表示,基于純視覺的自動駕駛方案在技術實現上更加困難,因為它需要神經網絡僅基于視頻輸入就可以運行得非常好。不過好處就是“一旦真正讓它工作起來,它就是一個通用的視覺系統,可以部署在地球上的任何地方”。
視覺感知系統未來不僅僅是部署在汽車上,也可以部署在任何需要視覺系統功能的其他產品上,比如機器人、無人機、AR/VR等,成為通用的能力,而這也是特斯拉的未來考量和野心。雖然特斯拉設想的未來美好,但是現實中,現下的視覺感知方案與激光雷達方案相比,還是有差距。我們在新聞中仍然會看到,特斯拉汽車因識別感知出現問題而發生車禍的安全事故,目前激光雷達派在安全方面還是笑著走在前面的。

激光雷達能笑到最后嗎?
兩個流派誰能笑到最后,也是考量規模量產與視覺路線技術的迭代誰的速度更快,我們可以通過數據發現,新注冊雷達企業越來越多。數據顯示,目前我國雷達相關企業共有1.4萬家,2020年新注冊企業2640家,同比增長29.3%。而上市公司禾賽科技、巨頭華為等發布的低成本激光雷達產品,已經準備量產。

供應端的增長態勢發展來源于需求端的龐大需求,絕大部分從事L3、L4級別自動駕駛的公司,包括初創公司和大公司,都采用了激光雷達,并且大多數都是購買激光雷達而不是自研的方式。
激光雷達方案,因為硬件高精度性能帶來的安全優勢,暫時的成本高也能被市場接受。大部分玩家接受激光雷達方案,使得需求端大,其產能也跟著擴大,規模量產在路上,而未來的成本也會因為規模優勢進一步降低,建立良性循環。
經過超過10年的發展,激光雷達被證明了是實現高級別自動駕駛的必備傳感器,特斯拉在這一態勢下也在著急研發,同時秀肌肉招人。此前,特斯拉與激光雷達技術公司Luminar簽訂了一份使用激光雷達進行測試和開發的合同的消息,引來大家伙的猜度。雖然后來特斯拉澄清自己會堅持純視覺路線一條道走到底,但是其使用激光雷達行為居心難測。
純視覺路線,攝像頭便宜但安全性堪憂,與算法、算力能力掛鉤,特斯拉依賴自有海量數據與超級計算機,這種優勢無人能模仿。而這也就意味著純視覺路線要么一騎絕塵,要么平分秋色,但市場其他企業無論結果如何都無法跟隨視覺感知路線,沒有兩把刷子參與進去,玩的就是心跳了。
兩種視覺感知路線長期來看,仍會因為成本與安全存在爭議,現在激光雷達規模發展速度與特斯拉的純視覺技術發展速度未見分曉,激光雷達能不能笑到最后不好說。但在現下,與未知的視覺感知技術發展相比,激光雷達方案已經在規模量產的路上,其美好態勢的發展讓這個派別有底氣去笑著迎接未來。


(聲明:本文僅代表作者觀點,不代表新浪網立場。)

作者簡介




